



















6 SERVO MOTOR DRIVING
6.1 Homing mode (hm)
85
6
■
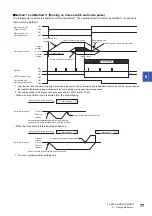
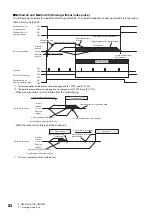
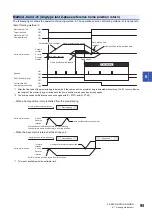
Torque limit changing dog type home position return (front end detection Z-phase reference)
The following figure shows the operation of Homing method -1 when "Torque limit changing dog type home position return
function selection" of [Pr. PT70] is set to "0" or "2" in the indexer method. The home position return direction of Homing
method -33 is opposite to that of Homing method -1.
*1 A delay time can be set with [Pr. PT39].
*2 After the front end of the proximity dog is detected, if the Z-phase is detected without reaching the creep speed, [AL. 90] occurs. Check
the home position return speed and creep speed and revise if necessary.
Statusword bit 10
Target reached
Statusword bit 12
Homing attained
Controlword bit 4
Homing operation start
Point actual value
Positive torque limit value
Negative torque limit value
[Pr. PC77]
[Pr. PC77]
0
0 r/min
*1
*2
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Power supply
Maintains the previous value
Setting time of
[Pr. PT56] or [Pr. PT57]
Home position
return speed
Creep speed
Forward
rotation
Servo motor speed
Home position shift
distance
Reverse
rotation
Setting time of
[Pr. PT56]
Proximity dog
Position where the station home position
shift distance is added
Z-phase
DOG (Proximity dog)
Enabled torque limit







































































