




























6 SERVO MOTOR DRIVING
6.2 Point table mode (pt)
125
6
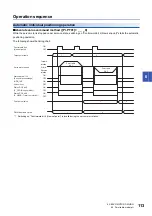
Example 2. Operations when "9" is set to the auxiliary function of point table No. 3
Operation sequence
1.
Starting with point table No. 2
2.
Executing point table No. 3
3.
Executing point table No. 1 when "9" is set to the auxiliary function of point table No. 3
4.
Repeating the above execution in the sequence of 1) to 2) to 3) to 1) to 2) to 3)
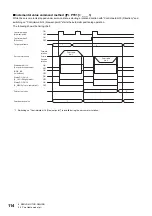
*1 "Point actual value" is not outputted in automatic continuous operation.
Point table No.
Position data
[10
STM
μ
m]
Servo motor
speed [r/min]
Acceleration
time constant
[ms]
Deceleration
time constant
[ms]
Dwell [ms]
Auxiliary
function
1
0.00
3000.00
100
150
100
1
2
5.00
2000.00
150
200
200
1
3
15.00
1000.00
300
100
150
9
5.00
1)
2)
3)
0
5.00
15.00
2
0 r/min
Target point table
ON
OFF
Point actual value
*1
ON
OFF
ON
OFF
ON
OFF
Controlword bit 4
(New set-point)
INP/S_INP
Status DO 5 bit 5
Status DO 5 bit 6
Point table No. 2
Point table No. 3
Speed
(2000.00)
Forward
rotation
Speed (1000.00)
Servo motor speed
Reverse
rotation
Speed
(3000.00)
Point table No. 1
Position address
(In-position)
(S_CPO (Rough match))
(S_MEND (Travel completion))







































































