

























6 SERVO MOTOR DRIVING
6.3 Indexer mode (idx)
151
6
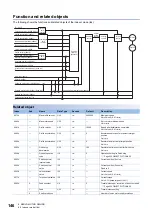
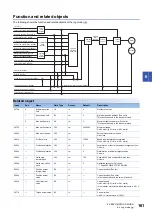
■
When using Target speed No. (2DD1h)
Use the value set in the point table as the servo motor speed, acceleration or deceleration time constant during operation. Set
the point table No. to be used in Target speed No. (2DD1h).
*1 When the specified station No. exceeds the value set in [Pr. PT28 Number of stations per rotation] - 1, the servo motor does not operate.
*2 "Controlword bit 4 (New set-point)" is not received when the remaining command travel distance is other than "0".
*3 Switching "Profile velocity" during servo motor rotation does not enable this.
*4 Operation is performed as follows.
*5 A delay time can be set with [Pr. PT39].
*6 After power-on, RXn1 turns on if the number of droop pulses is within the in-position range of each station position.
*7 This is enabled when any of Profile velocity (6081h), Profile Acceleration (6083h) or Profile deceleration (6084h) is set to 0.
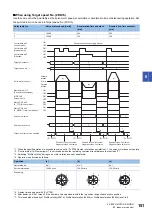
Point table No.
Servo motor speed [r/min]
Acceleration time constant
[ms]
Deceleration time constant
[ms]
1
100.00
200
200
2
150.00
150
150
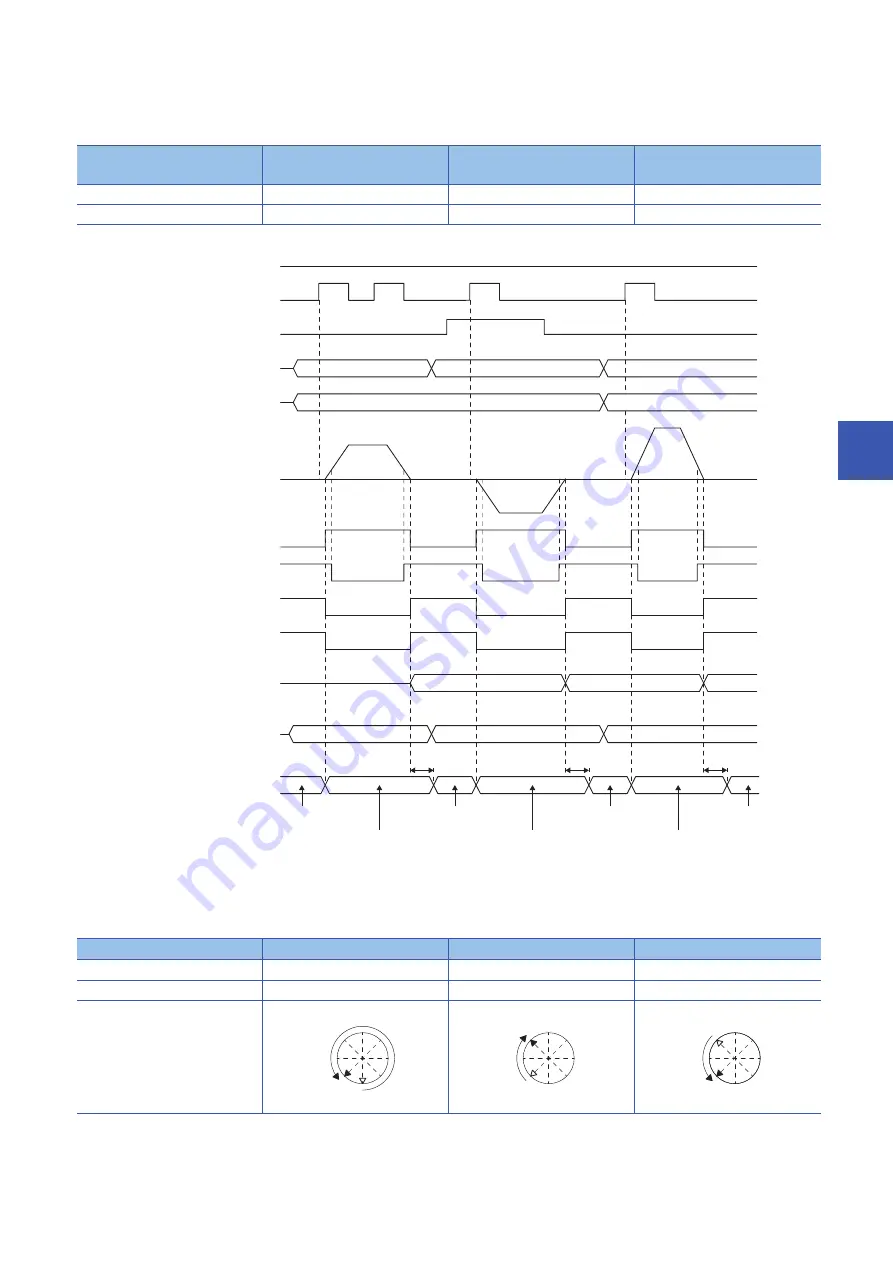
Operation
(a)
(b)
(c)
Next station No.
No. 1
No. 3
No. 1
Servo motor speed
100.00 r/min
100.00 r/min
150.00 r/min
Positioning
Controlword bit 6
(Indexer mode)
Target point table
*1
Target speed No.
*7
Controlword bit 4
(New set-point)
Controlword bit 5
(Direction)
*3
*5
Point demand value
Point actual value
1
1
3
1
2
(a)
(b)
(c)
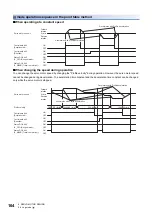
[Pr. PC77]
Positive torque limit value/
Negative torque limit value
[Pr. PC77]
Positive torque limit value/
Negative torque limit value
[Pr. PC77]
Positive torque limit value/
Negative torque limit value
[Pr. PC77]
*5
*5
1
3
1
1
3
1
*2
Statusword bit 12
(Set-point acknowledge)
ON
OFF
INP/S_INP
Status DO 5 bit 5
Status DO 5 bit 6
0 r/min
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Rotation direction specifying indexer
Forward
rotation
Servo motor speed
*4
Reverse
rotation
(In-position)
*6
(S_CPO (Rough match))
(S_MEND (Travel completion))
Torque limit value to be enabled
2
1
0
7
6
5
4
3
2
1
0
7
6
5
3
4
2
1
0
7
6
5
4
3





































































