



























206
9 MANUFACTURER FUNCTIONS
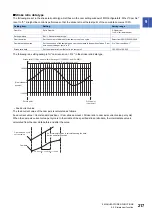
9.1 Stroke end
Perform a return as follows when the stroke end is detected.
_ _ _ 3
Travels for the droop
pulse portion and stops
the servo motor.
Continues operation for
a delay portion of the S-
pattern acceleration/
deceleration time
constants. The home
position is maintained.
A difference will not be
generated between the
command position and
the current position.
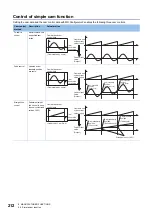
Mode
Return method
Point table mode (pt)
Perform operation opposite to the limit with the Jog mode (jg). After the servo motor moves within the limit
range, stop the operation and execute a home position return.
Jog mode (jg)
Perform operation opposite to the limit.
Indexer mode (idx)
Perform operation opposite to the limit with the Jog mode (jg). After the servo motor moves within the limit
range, stop the operation and execute a home position return.
[Pr. PD12]
setting
Operation status
Remark
During rotation at constant speed
During deceleration to a stop
0 r/min
(0 mm/s)
ON
OFF
No S-pattern acceleration/deceleration
With S-pattern acceleration/deceleration
Part of S-pattern
acceleration/deceleration
time constants
+
Droop pulses
Droop pulses
Servo motor
speed
LSP
or
LSN
0 r/min
(0 mm/s)
ON
OFF
No S-pattern acceleration/deceleration
With S-pattern acceleration/deceleration
Part of S-pattern
acceleration/deceleration
time constants
+
Droop pulses
Droop pulses
Servo motor
speed
LSP
or
LSN







































































