



























6 SERVO MOTOR DRIVING
6.3 Indexer mode (idx)
143
6
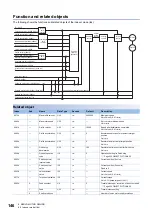
Rotation direction
There are two operation methods: Rotation direction specifying indexer, which always rotates in a fixed direction and executes
positioning to a station; Shortest rotating indexer, which automatically changes a rotation direction to the shortest distance and
executes positioning to a station.
Rotation direction specifying indexer
In this operation mode, the servo motor rotates in a fixed direction to execute positioning to a station.
Select a station No. with "Target point table" to execute positioning. The values set in the object are used for the servo motor
speed, acceleration time constant, and deceleration time constant during operation.
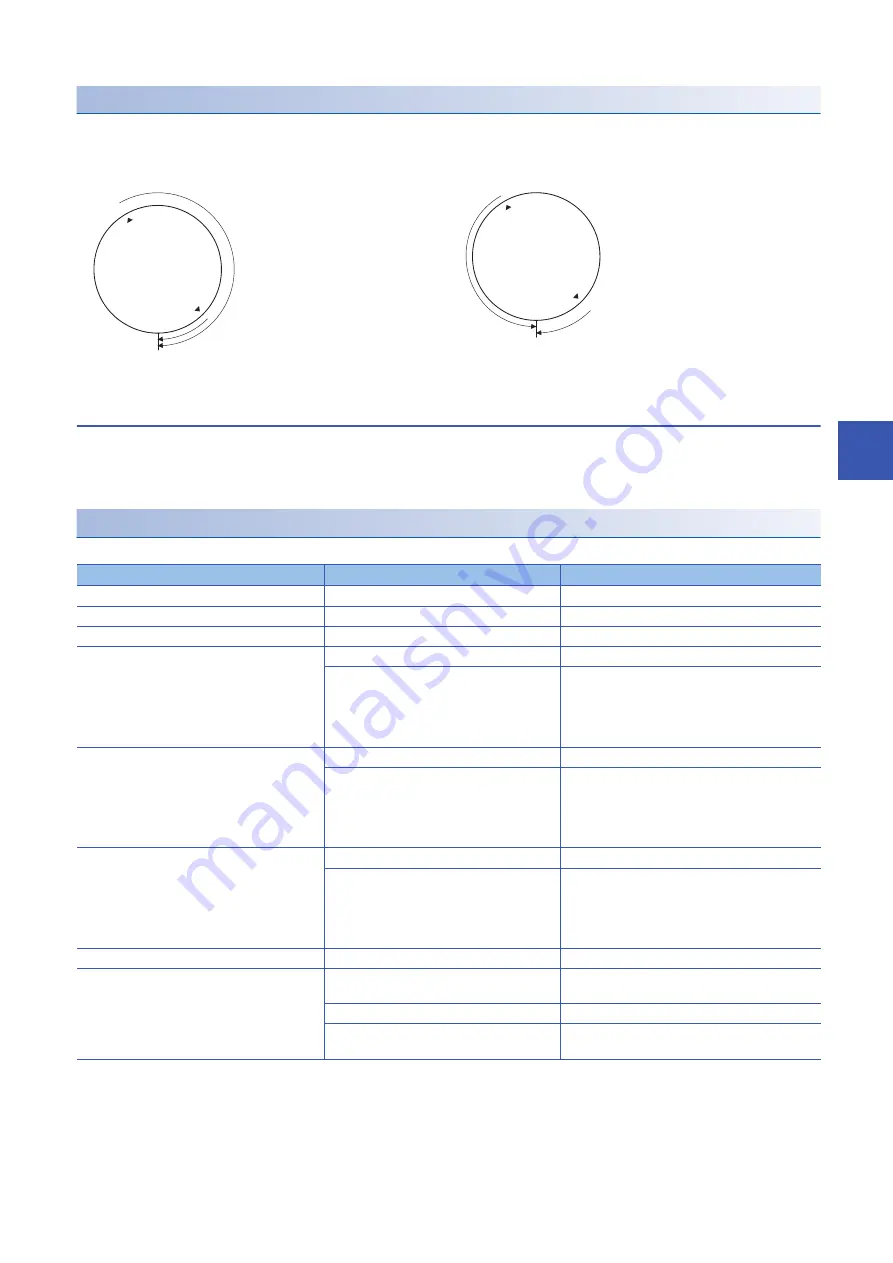
Setting
Set objects and parameters as shown below.
*1 The torque limit changes from the setting value of [Pr. PC77] to the setting value of "Positive torque limit value" or "Negative torque limit
value" when "Controlword bit 4 (New set-point)" is input. After the output of S_MEND (Travel completion) and the time set with [Pr.
PT39] has passed, the torque limit will be switched from the setting value of "Positive torque limit value" or "Negative torque limit value"
to the setting value of [Pr. PC77].
Rotation direction specifying indexer
Shortest rotating indexer
Item
Object/parameter to be used
Setting
Indexer mode (idx) selection
Modes of operation
Set "-103".
Next station position
Target point table
Set any next station No.
Rotation direction specifying indexer selection
Controlword
Turn off "Controlword bit 6 (Operation mode)".
Servo motor speed
Profile velocity
Set the servo motor speed.
Target speed No.
Set the command speed to the next station to be
executed.
When "Profile velocity", "Profile Acceleration", and
"Profile deceleration" are all set to values other than
0, the set value of "Target speed No." is disabled.
Acceleration time constant
Profile Acceleration
Set the acceleration time constant.
Target speed No.
Set the acceleration time constant to the next station
to be executed.
When "Profile velocity", "Profile Acceleration", and
"Profile deceleration" are all set to values other than
0, the set value of "Target speed No." is disabled.
Deceleration time constant
Profile deceleration
Set the deceleration time constant.
Target speed No.
Set the deceleration time constant to the next station
to be executed.
When "Profile velocity", "Profile Acceleration", and
"Profile deceleration" are all set to values other than
0, the set value of "Target speed No." is disabled.
Speed limit
Max profile velocity
Set a limit value of operation speed.
Torque limit
Positive torque limit value
Negative torque limit value
Set a torque limit value in operation.
[Pr. PC77]
Set a torque limit value in stop.
[Pr. PT39]
Set a time period for switching from the torque limit
value in operation to that in stop.







































































