



























6 SERVO MOTOR DRIVING
6.1 Homing mode (hm)
63
6
Related object
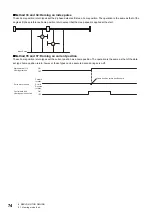
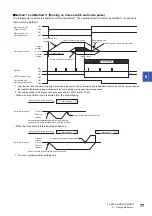
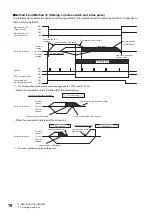
*1 In the homing mode (hm), the servo motor is brought to a sudden stop according to the deceleration time constant when the stroke end
is detected. Set the home position return speed carefully.
Index
Sub Index
Access
Name
Data Type
Default
Description
607Ch
0
ro
Home offset
I32
The home position
saved in EEP-ROM
is stored at
poweron. If a home
position return is
executed in the
homing mode (hm),
the home position
will be updated. If
[Pr. PA03 Absolute
position detection
system] is disabled,
0 is always stored.
6098h
0
rw
Homing Method
I8
37
Specify a home
position return
method. Refer to
the following for the
supported home
position return
methods.
6099h
0
rw
Homing Speeds
U8
2
Number of entries of
the home position
return speed
1
rw
Speed during
search for switch
U32
10000
Specify the travel
speed from home
position return start
to dog detection.
Unit: Vel unit (0.01 r/
min or 0.01 mm/s)
Range: 0 to servo
motor maximum
speed
2
rw
Speed during
search for zero
U32
1000
Specify the travel
speed to the home
position after dog
detection.
Unit: Vel unit (0.01 r/
min or 0.01 mm/s)
Range: 0 to servo
motor maximum
speed
609Ah
0
rw
Homing
acceleration
U32
0
Acceleration/
deceleration time
constant at home
position return Unit:
ms
60E3h
0
ro
Supported Homing
Method
U8
38
Number of entries of
the supported home
position return
method
1
ro
1
st
supported
homing method
I8
The supported
home position
return type is
returned.
38
ro
38
th
supported
homing method
I8







































































