


























6 SERVO MOTOR DRIVING
6.3 Indexer mode (idx)
157
6
Home position return method in which the servo motor does not operate during home
position return
The backlash compensation direction is determined as follows in "Backlash compensation direction selection at the time of
data set type home position return" in [Pr. PT38].
■
When [Pr. PT38] is set to "0 _ _ _" (automatic setting)
Before returning to the home position, be sure to perform jog operation and press the motor-side gear or feed screw toward
the machine side.
The backlash compensation direction is determined by the direction of rotation of the motor just before home position return
completion.
■
When [Pr. PT38] is set to "1 _ _ _" (CCW direction or positive direction) or "2 _ _ _" (CW or
negative direction)
The compensation is applied to the direction that has been set.
Before returning to the home position, be sure to press the gear or feed screw on the motor side toward the machine side in
the opposite direction to the direction of the [Pr. PT38] compensation.
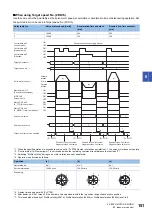
The timing chart is for when [Pr. PT38] is set to "1 _ _ _" (CCW direction or positive direction).
ON
OFF
ON
OFF
0 r/min
1000
2000
1000 - 10
2000
Status DO 2 bit 15
Target point table
Power supply
JOG operation
Forward
rotation
Servo motor speed
Reverse
rotation
No. 0
No. 1
No. 2
No. 1
No. 2
Servo motor current position
Home position return
As the rotation direction immediately before home position return is in the forward rotation,
backlash compensation is applied when positioning is performed in the reverse rotation.
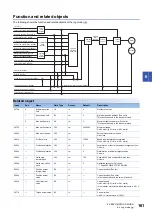
ON
OFF
ON
OFF
0 r/min
1000 + 10
2000 + 10
1000
2000 + 10
Status DO 2 bit 15
Target point table
Power supply
Forward
rotation
Servo motor speed
Reverse
rotation
No. 0
No. 1
No. 2
No. 1
No. 2
Servo motor current position
Home position return
The compensation will be applied to the compensation direction set in [Pr. PT38].







































































