





















106
6 SERVO MOTOR DRIVING
6.2 Point table mode (pt)
■
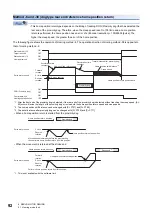
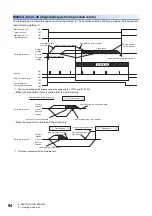
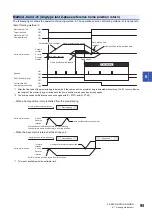
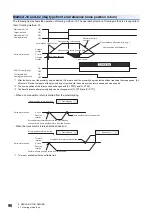
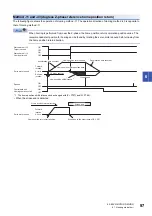
Operation
Selecting the point table with "Target point table" and switching on "Controlword bit 4 (New set-point)" starts positioning to the
position data at the set speed, acceleration time constant and deceleration time constant.
Switching on "Controlword bit 5 (Direction)" starts a reverse rotation of the motor in accordance with the values set to the
selected point table.
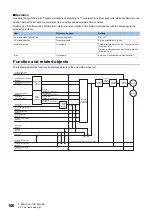
Function and related objects
The following shows the functions and related objects of the point table mode (pt).
Item
Object to be used
Setting
Point table mode (pt) selection
Modes of operation
Set "-101".
Point table selection
Target point table
Set the point table No. to use.
Rotation direction
Controlword
Forward rotation direction when "Controlword bit 5
(Direction)" is off.
Reverse rotation direction when "Controlword bit 5
(Direction)" is on.
Start
Controlword
Switch on "Controlword bit 4 (New set-point)".
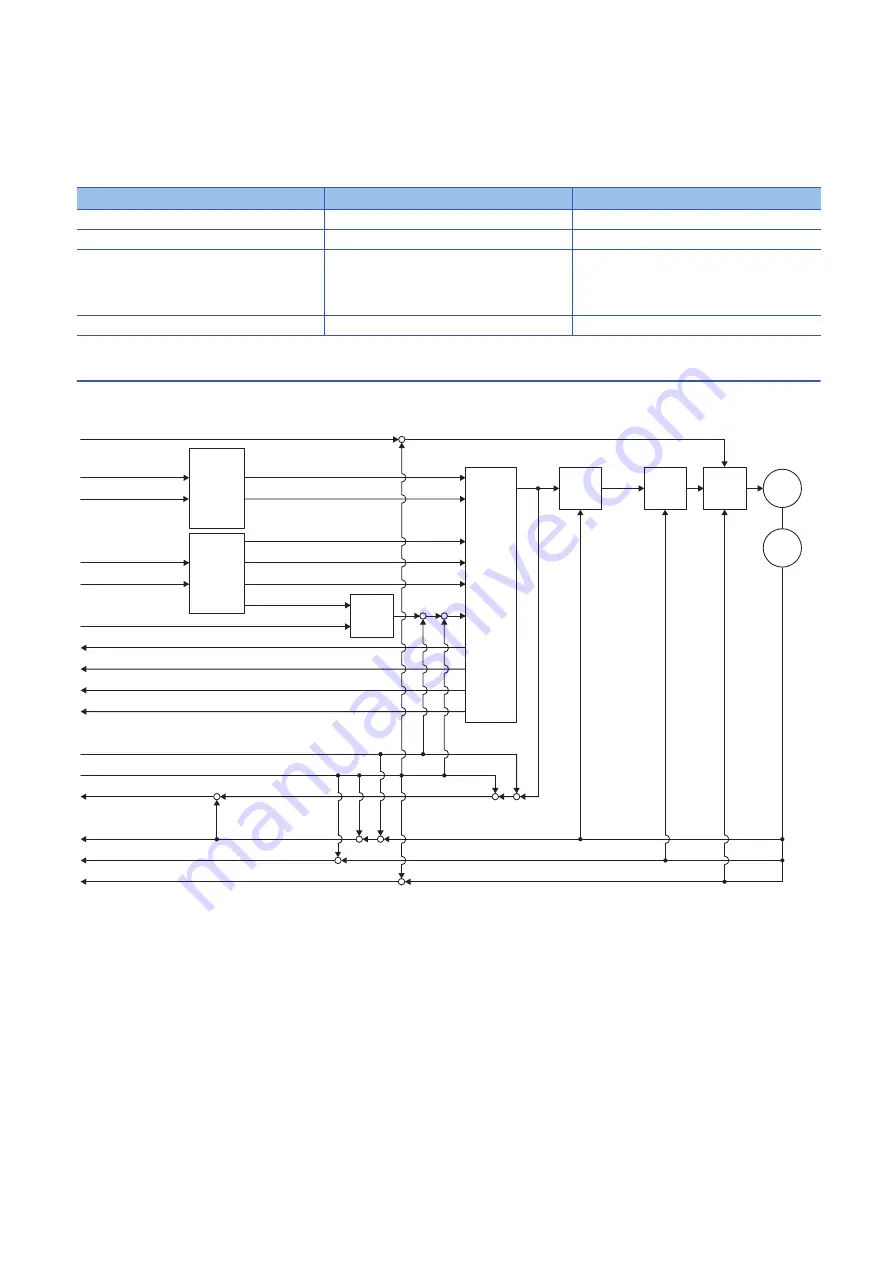
Position
trajectry
generator
+
×
×
×
×
×
-
Control
effort
(60FAh)
Position actual internal value (6063h)
×
×
Acceleration
limit
function
Position
limit
function
Position
control
Velocity
control
Torque
control
Encoder
Motor
Torque limit value
(60E0h, 60E1h)
Quick stop deceleration
(6085h)
Quick stop option code
(605Ah)
Target point table
(2D60h)
Software position limit
(607Dh)
Point demand value
(2D68h)
Gear ratio
(6091h)
Polarity
(607Eh)
Following error actual value
(60F4h)
Position actual value
(6064h)
Velocity actual value
(606Ch)
Torque actual value
(6077h)
Point table
(2801h to 28FFh)
Point table error
(2A43h)
M code actual value
(2D6Ah)
Point actual value
(2D69h)
Speed
(2801h: 2 to 28FFh: 2)
Acceleration
(2801h: 3 to 28FFh: 3)
Deceleration
(2801h: 4 to 28FFh: 4)
Point data
(2801h: 1 to 28FFh: 1)
Point
table
function
×
×







































































