























108
6 SERVO MOTOR DRIVING
6.2 Point table mode (pt)
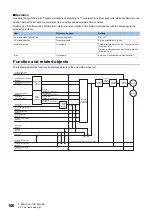
Details on the OMS bit of Controlword (pt mode)
2801h
to
28FFh
0
Point table 001 to
255
U8
ro
7
Number of entries
Point table
1
Point data
I32
rw
Position data
Unit: pos units
2
Speed
U32
rw
Speed
Unit: 0.01 r/min or 0.01 mm/s
3
Acceleration
U16
rw
Acceleration time constant
Unit: ms
4
Deceleration
U16
rw
Deceleration time constant
Unit: ms
5
Dwell
U16
rw
Dwell
Unit: ms
6
Auxiliary
U8
rw
Auxiliary function
2A43h
0
Point table error
U8
ro
2
Number of entries
Point table error
1
Point table error No.
I32
ro
Point table error No.
2
Point table error
factor
I32
ro
Point table error factor
The error status is indicated when this bit is
turned on.
Bit
Symbol
Description
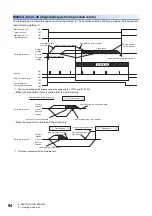
4
New set-point
The operation starts from the point table specified with the Target point table (2D60h) when the Bit
turns on.
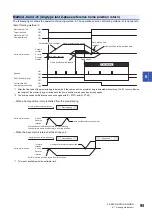
5
Direction
Specify the servo motor rotation direction. If the direction of the rotation is reversed while the servo
motor is rotating, the servo motor once stops and then starts rotating in the opposite direction.
The operations are performed when [Pr. PT01] is set to "_ _ _ 1 (incremental value command
method)".
0: Forward rotation direction
1: Reverse rotation direction
6
(reserved)
The value at reading is undefined. Set "0" when writing.
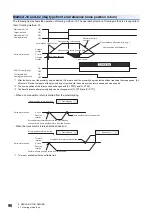
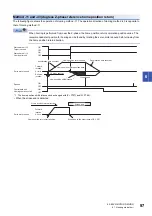
8
HALT
0: Positioning is executed.
1: The servo motor stops according to Halt option code (605Dh).
9
(reserved)
The value at reading is undefined. Set "0" when writing.
Index
Sub
Name
Data Type
Access
Default
Description







































































