



























6 SERVO MOTOR DRIVING
6.2 Point table mode (pt)
117
6
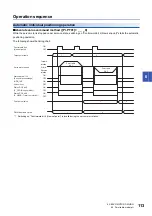
• When the position data is in degrees
The following shows an operation example with the set values listed in the table below.
In this example, point table No. 1 and point table No. 2 are under the absolute value command method, point table No. 3 is
under the incremental value command method, and point table No. 4 is under the absolute value command method.
*1 Always set "0" or "2" to the auxiliary function of the last point table among the consecutive point tables.
0: When using the point table with the absolute value command method
2: When using the point table with the incremental value command method
S_INP (in-position), S_CPO (rough match) and S_MEND (travel completion) turn on at the end of point table No. 3. Point
actual value sets at the end of point table No. 3.
For details of the operation timing of each signal, refer to "Positioning in a single direction".
Point table No.
Position data
[degree]
Servo motor
speed [r/min]
Acceleration
time constant
[ms]
Deceleration
time constant
[ms]
Dwell [ms]
Auxiliary
function
1
120.000
1000.00
100
150
100
1
2
-320.000
500.00
150
100
200
1
3
-230.000
3000.00
200
300
150
3
4
70.000
1500.00
300
100
Disabled
0
120
(-240)
40
(-320)
230
170
(-190)
70
(-290)
170
(-190)
120
(-240)
40
(-320)
0
0
0
0
0 r/min
ON
1
Target point table
Controlword bit 4
(New set-point)
OFF
Home position → Point table No. 1
Point table No. 1 → No. 2
Point table No. 3 → No. 4
Point table No. 2 → No. 3
Point table No. 1
Point table No. 4
Point table No. 3
Forward
rotation
Servo motor speed
Reverse
rotation
Point table No. 2







































































