


























152
6 SERVO MOTOR DRIVING
6.3 Indexer mode (idx)
Shortest rotating indexer
• Always perform a home position return. Executing positioning operation without home position return will
trigger [AL. 90 Home position return incomplete warning] and "Controlword bit 4 (New set-point)" will be
disabled.
• When the travel distances to a target station position are the same when rotated in CCW direction and CW
direction, the shaft will rotate to the station No. increasing direction.
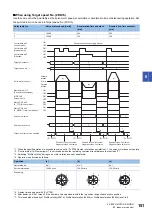
This operation mode automatically changes a rotation direction to the shortest distance to execute positioning to a station.
When Controlword bit6 (Indexer mode) is on, the shortest rotating indexer operation is enabled.
This disables "Controlword bit 5 (Direction)". The following timing chart shows that an operation is started from being stopped
at the station No. 0 at servo-on.
■
When using Profile velocity (6081h), Profile Acceleration (6083h) and Profile deceleration
(6084h)
For the servo motor speed, acceleration time constant and deceleration time constant during operation, the values set in
Profile velocity (6081h), Profile acceleration (6083h) and Profile deceleration (6084h) are used.
100.00 r/min
Profile velocity
*3
*5
1
3
1
(a)
(b)
(c)
[Pr. PC77]
Positive torque limit value/
Negative torque limit value
[Pr. PC77]
Positive torque limit value/
Negative torque limit value
[Pr. PC77]
Positive torque limit value/
Negative torque limit value
[Pr. PC77]
*5
*5
150.00 r/min
1
3
1
1
3
1
*2
Controlword bit 6
(Indexer mode)
Target point table
*1
Controlword bit 4
(New set-point)
Controlword bit 5
(Direction)
Point demand value
Point demand value
Statusword bit 12
(Set-point acknowledge)
ON
OFF
INP/S_INP
Status DO 5 bit 5
Status DO 5 bit 6
0 r/min
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Shortest rotating indexer operation
Forward
rotation
Servo motor speed
*4
Reverse
rotation
(In-position)
*6
(S_CPO (Rough match))
(S_MEND (Travel completion))
Torque limit value to be enabled







































































