



























6 SERVO MOTOR DRIVING
6.4 Jog mode (jg)
165
6
jg mode operation sequence in the indexer method
■
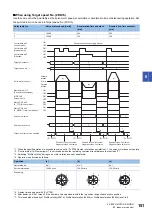
Station JOG operation
The following timing chart shows that a jog operation is started from being stopped at the station No. 0 at servo-on.
*1 "Controlword bit 4 (Rotation start)" is not received when the rest of command travel distance is other than "0".
*2 Switching "Profile velocity" during servo motor rotation does not enable this.
*3 A delay time can be set with [Pr. PT39].
Point actual value
Controlword bit 4
(Rotation start)
Controlword bit 5
(Direction)
Point demand value
1
2
3
5
6
7
7
2
6
5
0
0
4
4 3
*1
*2
150.00 r/min
Profile velocity
*3
[Pr. PC77]
Positive torque limit value/
Negative torque limit value
[Pr. PC77]
Positive torque limit value/
Negative torque limit value
[Pr. PC77]
Positive torque limit value/
Negative torque limit value
[Pr. PC77]
*3
*3
4
7
4
2
100.00 r/min
ON
OFF
INP/S_INP
Status DO 5 bit 5
Status DO 5 bit 6
0 r/min
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Forward
rotation
Servo motor speed
Reverse
rotation
(In-position)
(S_CPO (Rough match))
(S_MEND (Travel completion))
Torque limit value to be enabled







































































