





























[1
1]
Actuator Control Declaration
315
z
QRTN (Set quick-return mode)
Command, declaration
Extension
condition
(LD, A, O, AB, OB)
Input condition
(I/O, flag)
Command,
declaration
Operand 1
Operand 2
Output
(Output, flag)
E
N, Cnd
Cmnd
Operand 1
Operand 2
Pst
Optional
Optional
QRTN
0 or 1
Prohibited
CP
Applicable models
XSEL
-J/K
XSEL
-P/Q/
PCT/QCT
XSEL
-R/S
XSEL
-JX/KX
XSEL
-PX/QX
XSEL
-RX/SX/
RXD/SXD
ASEL
PSEL
SSEL
TT/TTA MSEL
{
{
{
× × ×
{
{
{
(PC/PG
only)
[Function]
Set and cancel the quick-return mode.
1) QRTN [Operand 1] = 0 (Normal mode)
Positioning is deemed complete when all command pulses have been output
and the current position is inside the positioning width.
* If a deceleration command is currently executed in the quick-return
mode, the system will wait for all command pulses to be output.
2) QRTN [Operand 1] = 1 (Quick-return mode)
Positioning is deemed complete when “a normal deceleration command is
currently executed (excluding deceleration due to a stop command, etc.) or all
command pulses have been output” and “the current position is inside the
positioning width”. This setting is used to perform other processing during
deceleration, in conjunction with a PBND command.
(Note 1)
The quick-return mode will be cancelled when the program ends. (The positioning
width set by a PBND command will not be cancelled.)
(Note 2)
If a given axis is used even once in the quick-return mode, the program will not
release the right to use the axis until the QRTN is set to “0” (normal mode) or the
program ends. Any attempt to use the axis from other program will generate an
“Error No. C66, Axis duplication error”.
(Note 3)
Following a return from a normal deceleration command in the quick-return mode,
the next positioning will start after all command pulses for the previous positioning
have been output. Therefore, in the quick-return mode a simple reciprocating
operation will require a longer tact time because of the extra completion check. In
this sense, this setting should be used only if you wish to reduce the overall tact
time by performing other processing during deceleration.
(Note 4)
The quick-return mode represents very irregular processing. Therefore, be sure
to revert to the normal mode when the overlay processing is completed in the
necessary section.
(Note 5)
The quick-return mode cannot be used with a push-motion travel command or arc
interpolation command.
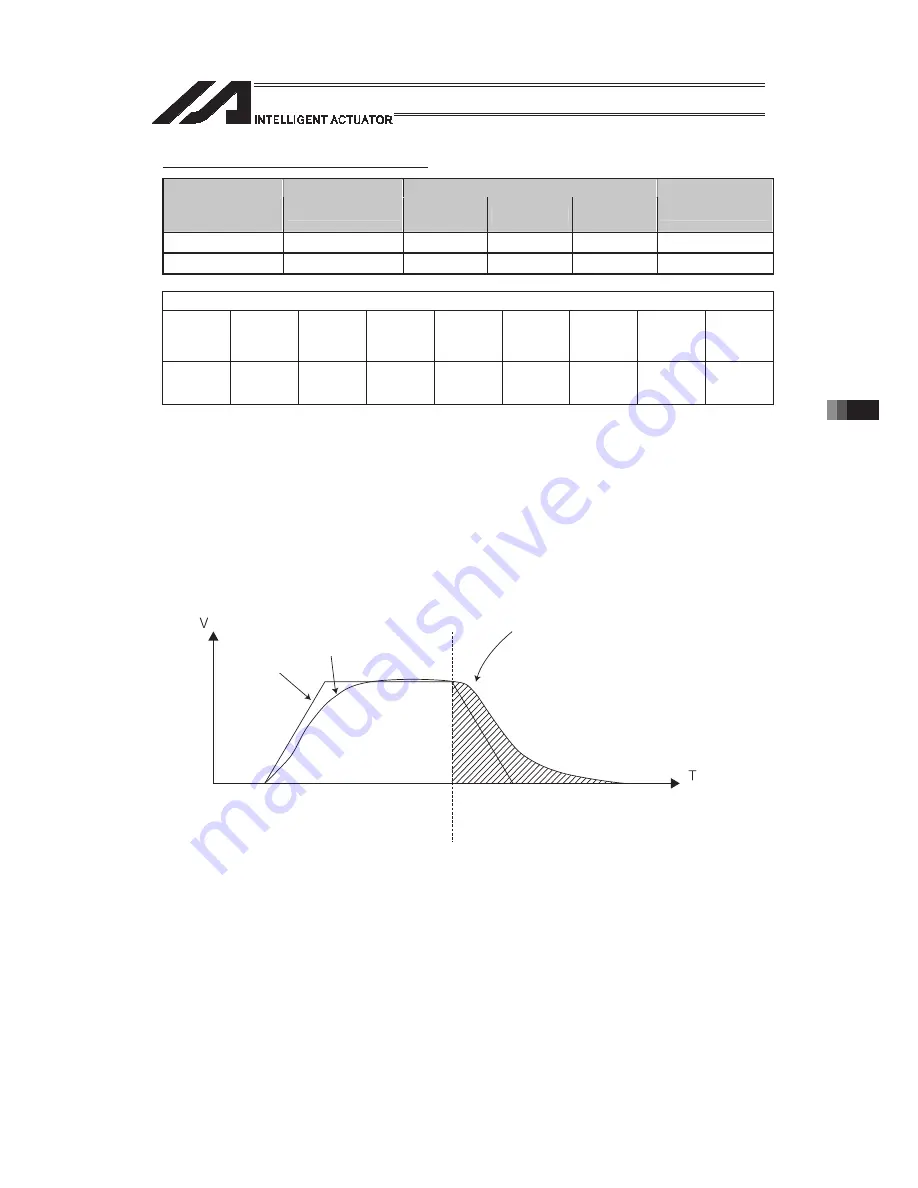
In the quick-return mode, the
set positioning width is valid
through this area.
Command pulses
Feedback pulses
Summary of Contents for PSEL
Page 2: ......
Page 10: ......
Page 18: ...8 Part 1 Installation ...
Page 37: ...27 Part 1 Installation 2 2 axis specification with battery ...
Page 382: ...372 Appendix Micro cylinder RCL Series Current limiting value ratio Push force N ...
Page 476: ...466 Appendix ...
Page 480: ...470 ...
Page 485: ...475 ...
Page 487: ...INTELLIGENT ACTUATOR SEL Language Programming Manual Eighth Edition ...
Page 488: ......
Page 490: ......
Page 494: ......
Page 518: ...24 ...
Page 526: ...32 ...
Page 831: ... 11 Actuator Control Declaration 337 Example DFIF 1 170 ...
Page 1060: ......
Page 1061: ......





















































