



























Chapter 6 Specification of Parameters GK600 User Manual
- 188 -
Reduction of integration time Ti can also quicken response time, but small Ti value will result in
big system overshooting and may easily bring about oscillation. Principle for adjustment of
proportional gain Kp and integration time Ti: proportional gain Kp is usually adjusted prior,
maximizing Kp at the premise of ensuring the system is subject to no oscillation, and then
adjust integration time Ti to provide the system with both instant response characteristic and
less overshooting.
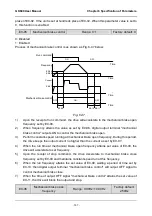
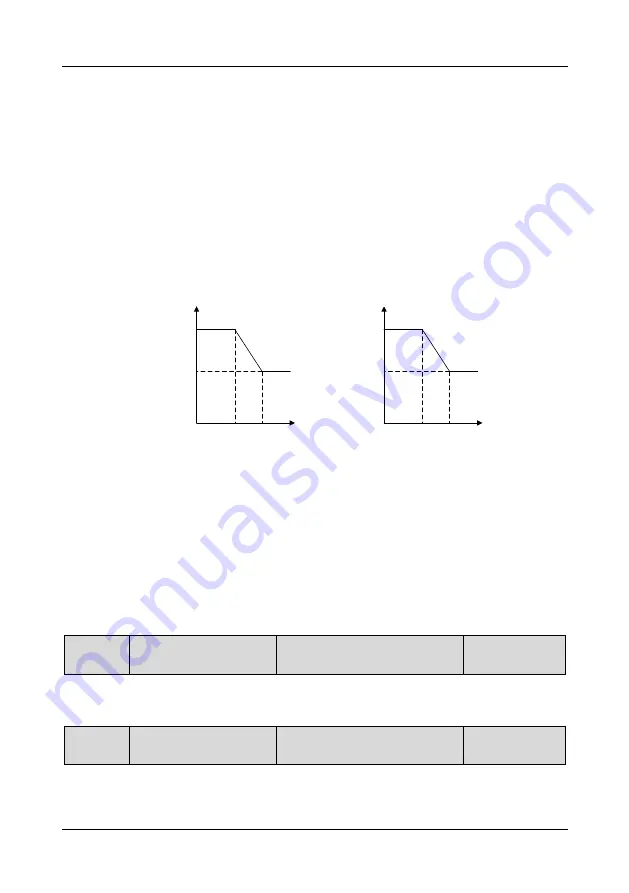
d2-01~d2-02 are the proportional gain and integration time of the drive at high speed.
d2-03~d2-04 are the proportional gain and integration time of the drive at low speed. Distinction
between high speed and low speed is determined by d2-05~d2-06. The diagram is as shown in
Fig. 6-46.
Fig. 6-46
ASR parameters are normally adjusted in the following order: select appropriate switching
frequency. Adjust proportional gain d2 -01 and integration time d2-02 at high speed, ensuring
the system has no oscillation and meets the requirements of dynamic response characteristics.
Adjust proportional gain d2-03 and integration time d2-04 at low speed, ensuring there is no
oscillation at low speed and requirements of dynamic response characteristics are met.
ATTENTION:
Inappropriate parameters of Kp, Ti may bring about overcurrent or overvoltage faults.
Usually, fine adjustment should be performed close to factory default parameter.
d2-07
ASR input filtering time
Range: 0.0ms~500.0ms
Factory default:
0.3ms
Sets the input filtering time of ASR. No need to modify its default setting if there is no special
requirement.
d2-08
ASR output filtering time
Range: 0.0ms~500.0ms
Factory default:
0.3ms
Sets the output filtering time of ASR. No need to modify its default setting if there is no special
requirement.
0
频率
速度环
KP
d2-03
d2-01
d2-05 d2-06
0
速度环
KI
d2-04
d2-02
d2-05 d2-06
频率
ASR KP
Frequency
ASR KI
Frequency







































































