





























Chapter 6 Specification of Parameters GK600 User Manual
- 184 -
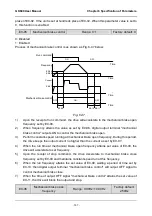
Fig. 6-44 Diagram of slip compensation on electric driven load
Fig. 6-45 Diagram of slip compensation on power generating load
d1-11
Droop control
Range: 0.00Hz~maximum
frequency
Factory default:
0.00Hz
In case several drives drive one load, different drives may bear different proportion of the load.
Through the setting of this parameter, the uniform load distribution on these drives could be
attained.
The drive takes real-time detection of its load. Output frequency is automatically dropped
according to the load and this parameter value, reducing itself borne load proportion.
Parameter value of d1-11 corresponds to drop frequency with rated load.
0
电机负载
电机转速
额定负载
n1 =
电机额定转速
n3 =
电机额定转速
-
额定转差
n2 =
电机额定转速
-
额定转差
/2
n1
n2
n3
转差补偿增益
(d1-10)=100%
转差补偿增益
(d1-10)=50%
转差补偿增益
(d1-10)=0%
0
电机负载
电机转速
额定负载
n1 =
电机额定转速
n3 =
电机额定转速
+
额定转差
n2 =
电机额定转速
+
额定转差
/2
n1
n2
n3
转差补偿增益
(d1-10)=100%
转差补偿增益
(d1-10)=0%
转差补偿增益
(d1-10)=50%
Motor speed
Slip compensation gain (d1-10) = 100%
Slip compensation gain (d1-10) = 50%
Slip compensation gain (d1-10) = 0%
n1 = rated speed of motor
n2 = rated motor speed - rated slip/2
n3 = rated motor speed - rated slip
Rated load
Motor load
Slip compensation gain (d1-10) = 0%
Motor speed
n3 = rated motor speed + rated slip
n2 = rated motor speed + rated slip/2
n1 = rated motor speed
Slip
compensation
gain (d1-10)
= 100%
Slip
compensation
gain (d1-10) =
50%
Rated load
Motor load







































































