





























Chapter 6 Specification of Parameters GK600 User Manual
- 156 -
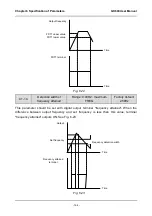
When frequency setting is "digital s terminal UP/DOWN adjustment", this parameter is
used to set the step size of frequency adjustment UP/DOWN. The step size is defined as
frequency change per second, and the smallest step size is 0.01 Hz/s.
C0-19
FWD/REV terminal control
mode
Range: 0~3
Factory default:
0
There are four different methods when run command is determined by FED/REV terminal. This
terminal control mode takes no effect on JOG.
0: Two-wire mode 1
FWD terminal inputs forward run command, while REV terminal inputs reverse run
command.
Table 6-11
Fig. 6-17
1: Two-wire mode 2
FWD terminal inputs run command, while REV terminal inputs run direction.
Table 6-12
Fig. 6-18
2: Three-wire mode 1
FWD terminal controls forward run of the drive, REV terminal controls reverse run, and digital
input terminal "three-wire run" controls the stop. Input signals of all these three terminals take
effect when trigger edge is detected.
FWD
REV
Run
command
command
OFF
OFF
Stop
OFF
ON
Reverse
ON
OFF
Forward
ON
ON
Stop
FWD
REV
Running
command
OFF
OFF
Stop
OFF
ON
Stop
ON
OFF
Forward
ON
ON
Reverse
+24V
变
频
器
PLC
FWD
REV
COM
K1
K2
+24V
变
频
器
PLC
FWD
REV
COM
K1
K2
Drive
Drive







































































