



























Chapter 6 Specification of Parameters GK600 User Manual
- 190 -
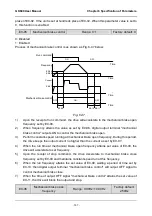
it needs to restrict the output brake torque of the motor. This parameter sets the torque
restriction source.
0: d2-15 digital setting
Restrict output brake torque through digital set parameter d2-15. 100% corresponds to rated
torque of the motor.
1: AI1
2: AI2
3: EAI (on IO option board)
Limit the torque through analog input. The limited range is "0~200%r x rated torque".
4: X6/DI pulse input
Restrict the torque through X6/DI pulse input. The limited range is "0~200%r x rated torque".
5: Communication
A superior device sets the restricted value of the output torque through standard RS485
communication interface at the drive. Refer to parameter Group H0 and appendix for details
of communication.
d2-14
Digital setting of driven
torque
Range: 0.0%~200.0%
Factory default:
180.0%
When 0 is selected for d2-12, this parameter value limits the maximum output driven torque.
100% corresponds to rated torque of the motor.
d2-15
Digital setting of brake
torque
Range: 0.0%~200.0%
Factory default:
180.0%
When d2-13 is set to 0, this parameter value limits the maximum output brake torque. 100%
corresponds to rated torque of the motor.
d2-16
Torque limit coefficient in
flux weakening
Range: 0.0%~100.0%
Factory default:
50.0%
Under the pattern of SVC speed control, and when the drive is running at frequency higher than
rated frequency (flux weakening zone), appropriate torque limit coefficient can effectively
improve the performance of output torque and Accel/Decel characteristics.
d2-17
Driven slip compensation
gain
Range: 10.0%~300.0%
Factory default:
100.0%
Under SVC pattern, adjustment of this parameter value can improve the speed accuracy when
driving electric-driven load. If the load is becoming heavier and the motor speed is relatively
lower, set a bigger value, while the motor speed is relatively higher, set a smaller value.
d2-18
Brake slip compensation
gain
Range: 10.0%~300.0%
Factory default:
100.0%







































































