





























9-53
9 Motion Control Functions
NJ-series CPU Unit Motion Control User’s Manual (W507)
9-
7 Co
mm
on
Fun
ctio
ns f
o
r Mu
lti-
ax
e
s
Coo
rdin
a
ted
Co
ntr
o
l
9
9-7-1
V
elo
city U
nder Mu
lti-ax
es Coord
inated
Control
9-7
Common Functions for Multi-axes
Coordinated Control
This section describes the common functions for multi-axes coordinated control.
To specify the velocity for multi-axes coordinated control, specify the interpolation velocity on the path.
The unit is the same as for single axes, command units/s.
The following is the only type of interpolation velocity for axes groups supported by the MC Function
Module.
The interpolation velocity used in an actual positioning motion is specified by the
Velocity
(Target Veloc-
ity) input variable to the motion control instruction.
You can read Axes Group Variables from the user program to monitor the interpolation velocity.
9-7-1
Velocity Under Multi-axes Coordinated Control
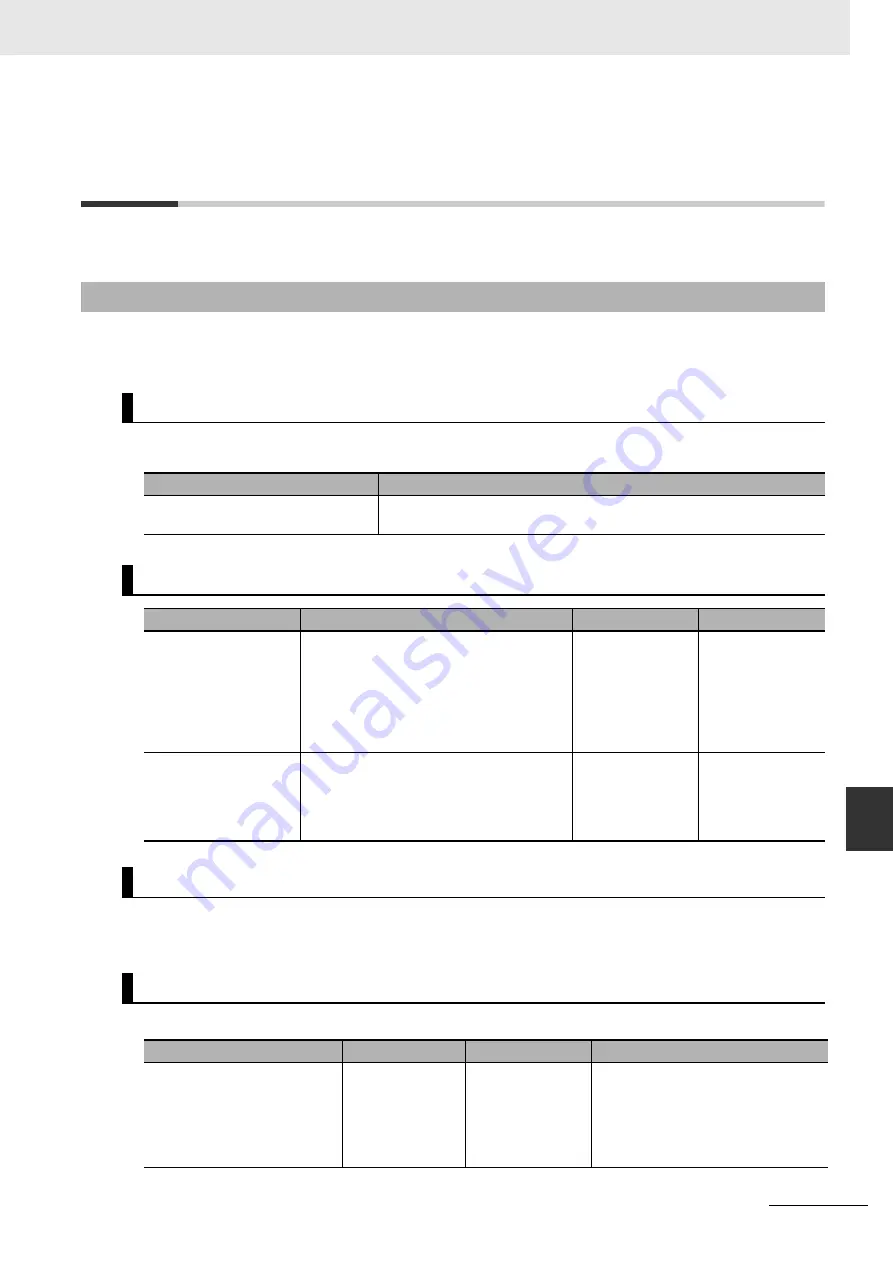
Types of Velocities
Velocity type
Definition
Command interpolation velocity
This is the actual value of the command interpolation velocity output by
the MC Function Module to control an axes group.
Axis Parameters That Are Related to Velocities
Parameter name
Function
Setting range
Default
Maximum Interpolation
Velocity
Set the maximum interpolation velocity for
the path. Set 0 for no interpolation velocity
limit. If a target velocity that exceeds the
maximum interpolation velocity is specified
for an axes group operation instruction, the
axis will move at the maximum interpolation
velocity.
Non-negative long
reals
800,000,000
Interpolation Velocity
Warning Value
Set the percentage of the maximum inter-
polation velocity at which to output an inter-
polation velocity warning. No interpolation
velocity warning is output if 0 is set.
(Unit: %)
0 to 100
0
Specifying Target Velocities for Axis Operations
Monitoring Velocities
Variable name
Data type
Meaning
Function
_MC_GRP[0-31].Cmd.Vel
LREAL
Command Interpo-
lation Velocity
This is the current value of the com-
mand interpolation velocity. A plus
sign is added during travel in the pos-
itive direction, and a minus sign is
added during travel in the negative
direction.
Содержание NJ501-1300
Страница 12: ...Sections in this Manual 10 NJ series CPU Unit Motion Control User s Manual W507...
Страница 18: ...16 NJ series CPU Unit Motion Control User s Manual W507 CONTENTS...
Страница 22: ...Read and Understand this Manual 20 NJ series CPU Unit Motion Control User s Manual W507...
Страница 34: ...Revision History 32 NJ series CPU Unit Motion Control User s Manual W507...
Страница 44: ...1 Introduction to the Motion Control Function Module 1 10 NJ series CPU Unit Motion Control User s Manual W507...
Страница 58: ...2 Motion Control Configuration and Principles 2 14 NJ series CPU Unit Motion Control User s Manual W507...
Страница 86: ...3 Configuring Axes and Axes Groups 3 28 NJ series CPU Unit Motion Control User s Manual W507...
Страница 98: ...4 Checking Wiring from the Sysmac Studio 4 12 NJ series CPU Unit Motion Control User s Manual W507...
Страница 122: ...5 Motion Control Parameters 5 24 NJ series CPU Unit Motion Control User s Manual W507...
Страница 158: ...6 Motion Control Programming 6 36 NJ series CPU Unit Motion Control User s Manual W507...
Страница 166: ...7 Manual Operation 7 8 NJ series CPU Unit Motion Control User s Manual W507...
Страница 182: ...8 Homing 8 16 NJ series CPU Unit Motion Control User s Manual W507...
Страница 346: ...10 Sample Programming 10 92 NJ series CPU Unit Motion Control User s Manual W507...
Страница 422: ...Appendices A 18 NJ series CPU Unit Motion Control User s Manual W507...
Страница 423: ...Index 1 NJ series CPU Unit Motion Control User s Manual W507 I Index...
Страница 430: ...Index 8 NJ series CPU Unit Motion Control User s Manual W507 Index...







































































