





























380
Torque Control
Section 10-6
or other cause), execute DEVICE SETUP before the next SERVO LOCK
and switch the Servo Drive to position control mode.
(2) In torque control mode, axis stop operations due to errors are executed
after switching to position control. The output torque for these stop oper-
ations depends on the setting for error operation in the Current Limit Des-
ignation Bit. during torque control execution, if the Current Limit
Designation Bit is not set to ON, the axis stop operation due to error will
be executed with the torque limit disabled. To enable the torque limit for
axis stop operations due to errors, turn ON the Current Limit Designation
Bit while torque control is being executed and set Servo Parameters
No.2
Torque Limit
(Pn05F) when using G-series Servo Drives, and
Forward
Rotation External Current Limit
(Pn404) or
Reverse Rotation External
Current Limit
(Pn405) when using W-series Servo Drives.
Status and Monitoring
during Torque Control
When TORQUE CONTROL is executed, some of the Status Flags, monitoring
functions, and display units change.
Servo Status Flags in Axis
Operating Input Memory
Area (Word b+1)
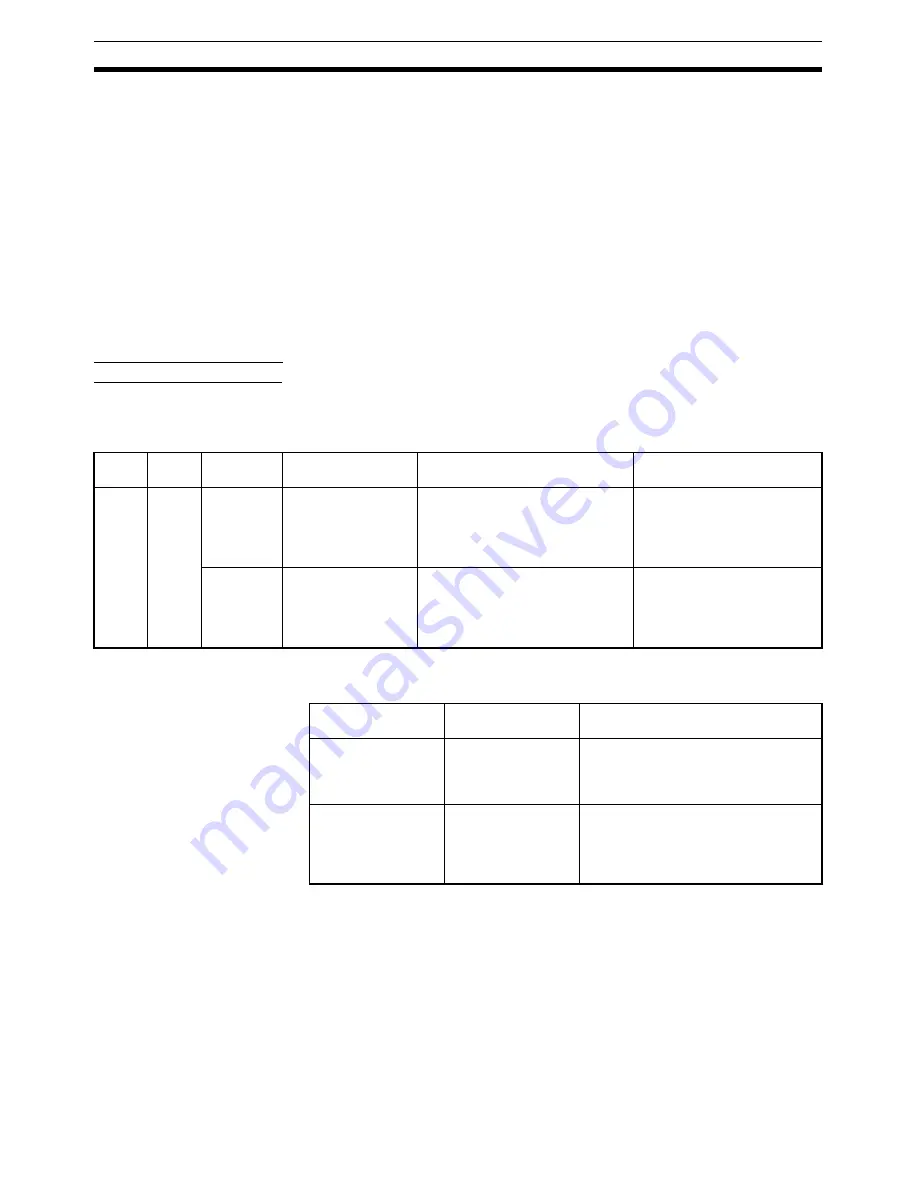
The function of bit 11 in the Servo Status Flags of the Axis Operating Input
Memory Area depends on whether position control or torque control is used.
Monitors 1 and 2 in Axis
Operating Input Memory
Areas
When the torque is selected for monitor 1 or 2, the monitoring unit for position
control/speed control, and torque control changes, as follows:
Word
Bits
Control
mode
Flag name
Function
Function change timing
b+1
11
Position
control
Positioning Proxim-
ity (NEAR) Flag
ON when within
Positioning Com-
pletion Range 2
The function changes when
the command to switch to
position control has been
received (when the Receiving
Command Flag turns OFF).
Torque con-
trol
Speed Limit (V_LIM)
Status Flag
ON when speed limit in progress
using speed limit value specified in
option command value 1.
The function changes when
TORQUE CONTROL has
been received (when the
Receiving Command Flag
turns OFF).
Control mode
Speed monitoring
unit
Unit change timing
Position con-
trol/speed control
% (1% unit)
(percentage of Ser-
vomotor’s rated
torque)
The unit changes when the command
to switch to position control or speed
control has been received (when the
Receiving Command Flag turns OFF).
Torque control
0.001%
(percentage of Ser-
vomotor’s momen-
tary maximum
torque)
The unit changes when TORQUE
CONTROL has been received (when
the Receiving Command Flag turns
OFF).
Содержание CJ1W-MA - REV 10-2008
Страница 3: ...iv ...
Страница 5: ...vi ...
Страница 21: ...xxii ...
Страница 57: ...30 Starting Operation Section 2 2 ...
Страница 97: ...70 Wiring Section 3 4 ...
Страница 247: ...220 Transferring Servo Parameters Section 5 3 ...
Страница 281: ...254 Standard Settings for Servo Drives Using MECHATROLINK Section 6 4 ...
Страница 343: ...316 Absolute Encoder Origin Section 8 6 ...
Страница 375: ...348 Linear Interpolation Section 9 7 ...
Страница 423: ...396 DEVIATION COUNTER RESET Section 10 10 ...
Страница 631: ...604 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 641: ...614 Index ...
Страница 643: ...616 Revision History ...





















































