





























7
List of Functions and Specifications
Section 1-4
Control com-
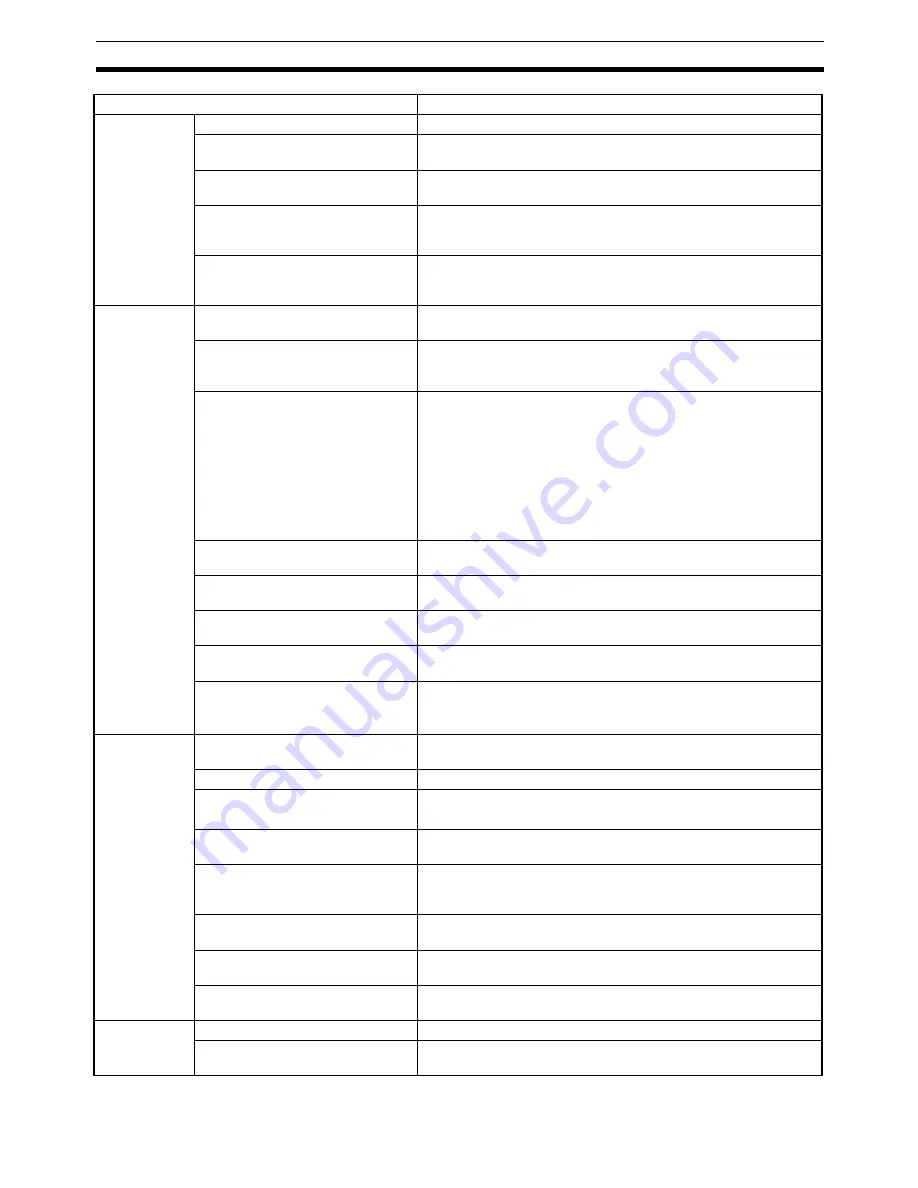
mand range
Position command range
−
2,147,483,648 to 2,147,483,647 (command units)
Speed command range for position
control
0 to 2,147,483,647 (command units/s)
Acceleration/deceleration speeds
for position control
1 to 65,535 (10,000 command units/s
2
)
Speed command range for speed
control
−
199.999% to 199.999%
The upper limit of the speed command range depends on the
specifications of the Servo Drive.
Torque command range for torque
control
−
199.999% to 199.999%
The upper limit of the torque command range depends on the
specifications of the Servo Drive.
Control func-
tions
Servo lock/unlock
Creates (Servo lock) or releases (Servo unlock) the position loop
on the PCU.
Position control
Positions to an absolute position or relative position according to
the target position and target speed specified from the ladder pro-
gram.
Origin determination
• Origin search: Establishes the origin using the specified search
method.
• Present position preset: Changes the present position to a speci-
fied position to establish the origin.
• Origin return: Returns the axis from any position to the estab-
lished origin.
• Absolute encoder origin: Establishes the origin using a Servomo-
tor that has an absolute encoder, without having to use an origin
search.
Jogging
Outputs pulses at a fixed speed in the forward rotation or reverse
rotation direction.
Interrupt feeding
Performs positioning by moving the axis a fixed amount when an
external interrupt input is received while the axis is moving.
Speed control
Performs speed control by sending a command to the Servo Drive
speed loop.
Torque control
Performs torque control by sending a command to the Servo Drive
current loop.
Stop functions
• Deceleration stop: Decelerates the moving axis to a stop.
• Emergency stop: Positions the moving axis for the number of
pulses remaining in the deviation counter and then stops the axis.
Auxiliary func-
tions
Acceleration/deceleration curves
Sets one of the following: a trapezoidal (linear) curve, an exponen-
tial curve, or an S-curve (moving average).
Torque limit
Restricts the output torque during axis operation.
Override
Multiplies the axis command speed by a specified ratio.
Override: 0.01% to 327.67%
Servo parameter transfer
Reads and writes the Servo Drive parameters from the ladder pro-
gram in the CPU Unit.
Monitoring function
Monitors the control status of the Servo Drive, such as the com-
mand coordinate positions, feedback position, current speed, and
torque.
Software limits
Limits software operation within the positioning range during posi-
tion control.
Backlash compensation
Compensates for the amount of play in the mechanical system
according to a set value.
Deviation counter reset
The position deviation in the Servo Drive’s deviation counter can
be reset to 0 (unit version 1.3 or later).
External I/O
Position Control Unit
One MECHATROLINK-II interface port
Servo Drive I/O
Forward/reverse rotation limit inputs, origin proximity inputs, exter-
nal interrupt inputs 1 to 3 (can be used as external origin inputs)
Item
Specification
Содержание CJ1W-MA - REV 10-2008
Страница 3: ...iv ...
Страница 5: ...vi ...
Страница 21: ...xxii ...
Страница 57: ...30 Starting Operation Section 2 2 ...
Страница 97: ...70 Wiring Section 3 4 ...
Страница 247: ...220 Transferring Servo Parameters Section 5 3 ...
Страница 281: ...254 Standard Settings for Servo Drives Using MECHATROLINK Section 6 4 ...
Страница 343: ...316 Absolute Encoder Origin Section 8 6 ...
Страница 375: ...348 Linear Interpolation Section 9 7 ...
Страница 423: ...396 DEVIATION COUNTER RESET Section 10 10 ...
Страница 631: ...604 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 641: ...614 Index ...
Страница 643: ...616 Revision History ...





















































