





























270
Limit Input Operations
Section 7-5
7-5
Limit Input Operations
The PCU uses the Servo Drive's internal forward drive prohibited signal input
and reverse drive prohibited signal input as the forward rotation limit input sig-
nal and reverse rotation limit input signal, respectively. Additionally, the for-
ward/reverse software limits can be used by setting the Servo Parameters.
The stop operation when the forward/reverse rotation limit input signal is input,
and the forward/reverse software limit is reached depend on the Servo Param-
eter settings, as shown in the following table.
Note
(1) This operation occurs when a limit input signal is input in the direction op-
posite to the travel direction due to incorrect wiring or other cause.
(2) For details on software limit functions, refer to
10-8 Software Limits
.
(3) If the limit input signal inputs (Servo Drive's forward drive prohibited sig-
nal and reverse drive prohibited signal) are not allocated, the Servo Drive
will not stop the Servomotor when the signal is input, and the PCU will
also not detect limit inputs as errors. When using a PCU, always allocate
the Servo Drive's forward drive prohibited signal and reverse drive prohib-
ited signal to enable use of the limit input signals. (Refer to
6-4 Standard
Settings for Servo Drives Using MECHATROLINK
.)
(4) Make sure that the limit input signals maintain a signal width no shorter
than the MECHATROLINK communications cycle. Input signals that are
shorter than the communications cycle cannot be detected by the PCU.
When using a G-series Servo Drive or W-series Servo Drive, the Servomo-
tor's stop operation at the Servo Drive when a limit input signal is input or a
software limit is reached is set in the Servo Parameters for limit input opera-
tions.
When using a SMARTSTEP Junior Servo Drive, the Servo is locked after
decelerating to a stop with the maximum Servomotor torque. The following
function cannot be used.
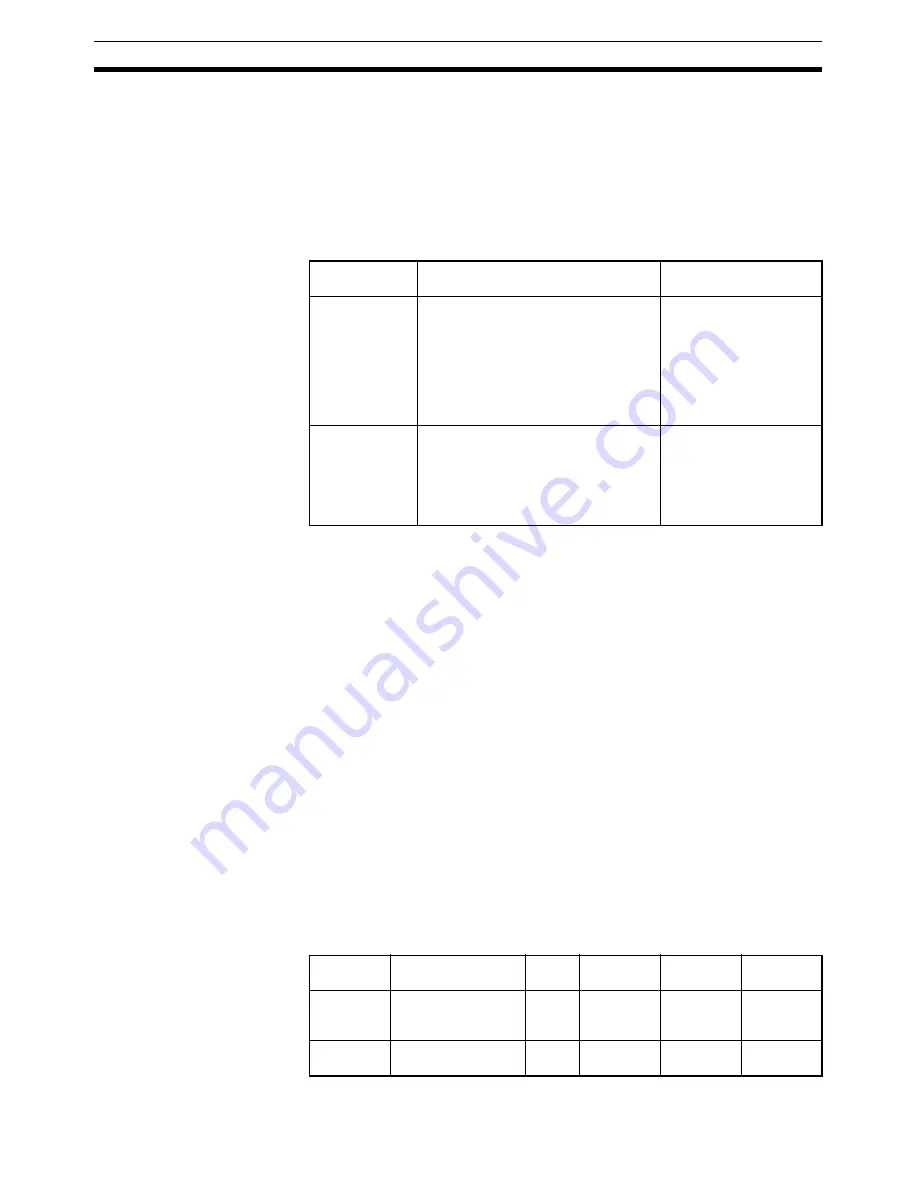
Servo Parameters
G-series Limit Input Parameters
Travel direction limit
Reverse travel direction
limit (See note 1.)
Limit input sig-
nal
The Servomotor operation is stopped
at the Servo Drive according to the set-
ting of Servo Parameter Pn001.1
(Pn004 for G Series).
At the PCU, a limit input error occurs,
causing an emergency stop, except
when using the origin search opera-
tion's reversal mode.
An emergency stop
caused by a limit input
error is executed at the
PCU, except when exe-
cuting ORIGIN SEARCH.
Software limit
The Servomotor operation is stopped
at the Servo Drive according to the set-
ting of Servo Parameter Pn001.1
(Pn004 for G Series). (See note 2.)
At the PCU, a software limit error
occurs, causing an emergency stop.
---
Parameter
No.
Parameter name
Unit
Setting
range
Parameter
size
Default
setting
Pn066
Stop selection for
drive prohibition
input
---
0 to 2
2
0
Pn06E
Emergency stop
torque
%
0 to 300
2
0
Содержание CJ1W-MA - REV 10-2008
Страница 3: ...iv ...
Страница 5: ...vi ...
Страница 21: ...xxii ...
Страница 57: ...30 Starting Operation Section 2 2 ...
Страница 97: ...70 Wiring Section 3 4 ...
Страница 247: ...220 Transferring Servo Parameters Section 5 3 ...
Страница 281: ...254 Standard Settings for Servo Drives Using MECHATROLINK Section 6 4 ...
Страница 343: ...316 Absolute Encoder Origin Section 8 6 ...
Страница 375: ...348 Linear Interpolation Section 9 7 ...
Страница 423: ...396 DEVIATION COUNTER RESET Section 10 10 ...
Страница 631: ...604 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 641: ...614 Index ...
Страница 643: ...616 Revision History ...





















































