





























10
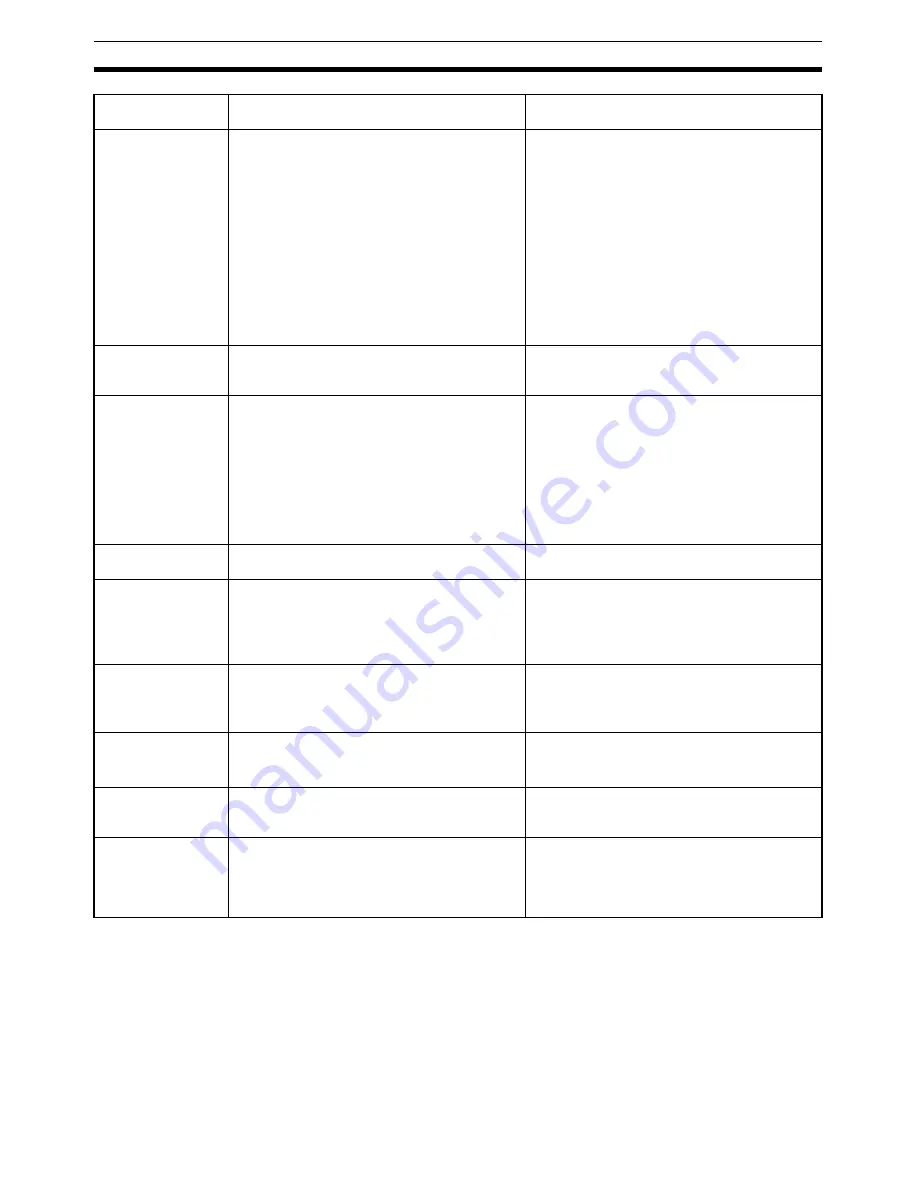
Comparison with Existing Models
Section 1-6
Note
The response time depends on the cycle time of the PLC and the MECHA-
TROLINK communications settings. The time shown in the table is the maxi-
mum value obtained when calculated according to specified measurement
conditions. For details, refer to
Appendix A Performance Characteristics
.
Origin search
Origin search method:
• The origin input signal is detected after the ori-
gin proximity input signal turns OFF.
• The origin input signal is detected after the ori-
gin proximity input signal turns ON. (Unit ver-
sion 2.0 or later)
• The origin input signal is detected without
using the origin proximity input signal. (Unit
version 2.0 or later)
Origin search methods:
• The origin input signal is detected after the ori-
gin proximity input signal turns ON.
• The origin input signal is detected after the ori-
gin proximity input signal turns OFF.
• The origin input signal is detected without
using the origin proximity input signal.
Origin compensation: After detecting the origin
input signal, positioning is performed for the ori-
gin return final travel distance (specified in Servo
Parameters).
Origin compensation: The axis is moved for the
amount specified by the origin compensation
data (specified from the Unit) at the proximity
speed.
Acceleration/decel-
eration curves
Trapezoidal curve, exponential curve, or S-curve
S-curve acceleration/deceleration uses a mov-
ing average.
Trapezoidal curve or S-curve
S-curve acceleration/deceleration uses a ter-
tiary function.
Setting acceleration/
deceleration speeds
Accelerations and decelerations are specified in
units of 10,000 command units/s
2
. Servo param-
eters are set individually for each axis.
The times in milliseconds required to reach the
maximum speed from the initial speed and to
reach the initial speed from the maximum speed
are specified
Direct operation: Acceleration/deceleration
speeds are specified as operation data from the
PLC.
Memory operation: Up to 9 acceleration/deceler-
ation speeds per axis are recorded in the Unit.
Deviation counter
reset
Supported (unit version 1.3 or later).
Supported.
Emergency stop
A hardware input contact is not provided on the
Position Control Unit.
Stopping is possible after moving the number of
pulses remaining in the deviation counter by
using an allocated operation bit.
The PCU's hardware input contact is used.
Data transfer method Writes/reads using the Data Transfer Bit.
• Data can be read or written using the Data
Transfer Bit.
• Data can be read or written using the IOWR/
IORD instruction.
Saving data
Parameters can be saved to the flash memory in
the PCU.
Servo Parameters are saved in the Servo Drive.
Axis Parameters and Zone Data are saved in the
flash memory in the PCU.
CPU Unit cycle time
extension for END
refresh
1 ms max. per 16 axes (using the CS1/CJ1-H
CPU Unit)
0.5 ms max. per PCU
Response time
4 ms max. (time from when the start commands
for the ladder program are sent until the Servo
Drive receives the control command when four
axes are connected) (See note.)
4 ms max. (time from when the start commands
for the ladder program are sent until the Position
Control Unit performs pulse output when all axes
of a four-axis Unit are being operated simulta-
neously)
Functions and
performance
CJ1W-NC
@
71
CS1W-NC
@
71
CJ1W-NC
@
13/
@
33
CS1W-NC
@
13/
@
33
Содержание CJ1W-MA - REV 10-2008
Страница 3: ...iv ...
Страница 5: ...vi ...
Страница 21: ...xxii ...
Страница 57: ...30 Starting Operation Section 2 2 ...
Страница 97: ...70 Wiring Section 3 4 ...
Страница 247: ...220 Transferring Servo Parameters Section 5 3 ...
Страница 281: ...254 Standard Settings for Servo Drives Using MECHATROLINK Section 6 4 ...
Страница 343: ...316 Absolute Encoder Origin Section 8 6 ...
Страница 375: ...348 Linear Interpolation Section 9 7 ...
Страница 423: ...396 DEVIATION COUNTER RESET Section 10 10 ...
Страница 631: ...604 Additional Functions for the CJ1W NCF71 MA Appendix F ...
Страница 641: ...614 Index ...
Страница 643: ...616 Revision History ...





















































