





























184 Parameters
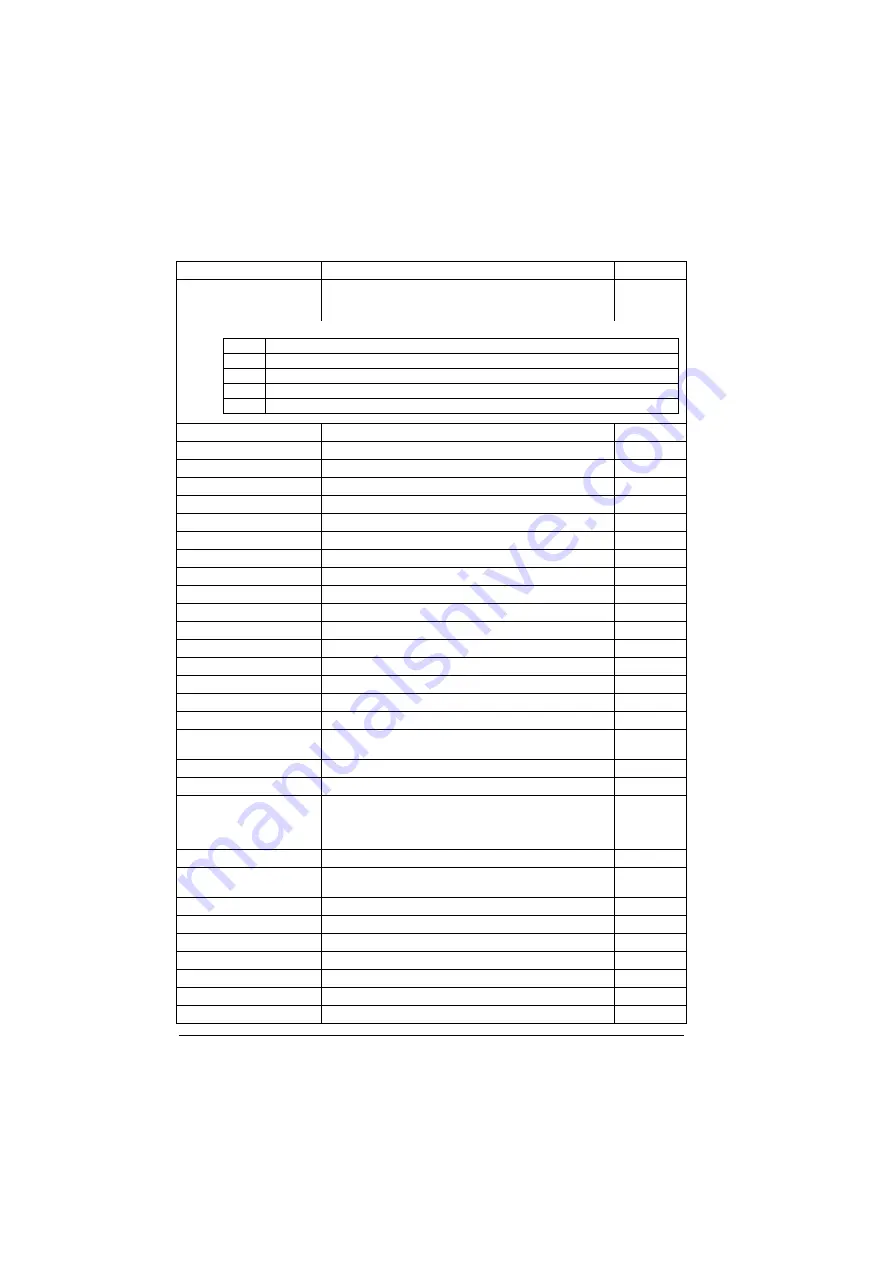
Contains the values of relay outputs that are used instead of
the connected signals if selected in parameter
. Bit 0 is the forced value for RO1.
0b0000
0b0000...0b1111
Forced RO values.
1 = 1
Selects a drive signal to be connected to relay output RO1.
Not energized
Output is not energized.
0
Energized
Output is energized.
1
Ready run
2
Enabled
4
Started
5
Magnetized
6
Running
7
Ready ref
8
At setpoint
9
Reverse
(see page
).
10
Zero speed
(see page
).
11
Above limit
Bit 10 of
(see page
).
12
Warning
13
Fault
14
Fault (-1)
Inverted bit 3 of
(see page
).
15
Fault/Warning
(see page
16
Overcurrent
Fault
has occurred.
17
Overvoltage
Fault
has occurred.
18
Drive temp
Fault
has occurred.
19
Undervoltage
Fault
has occurred.
20
Motor temp
Fault
has occurred.
21
Brake command
). 22
Ext2 active
23
Remote control
24
Timed function 1
(see page
27
Timed function 2
(see page
28
Timed function 3
(see page
29
Reserved
30...32
No.
Name/Value
Description
Def/FbEq16
Bit
Value
0
Force the value of this bit to RO1, if so defined in parameter
1
Force the value of this bit to RO2, if so defined in parameter
2
Force the value of this bit to RO3, if so defined in parameter
3…15
Reserved
Summary of Contents for ACS560
Page 1: ...ABB GENERAL PURPOSE DRIVES ACS560 standard control program Firmware manual...
Page 4: ...4...
Page 30: ...30 Start up control with I O and ID run...
Page 32: ...32 Using the control panel...
Page 100: ...100 Program features...
Page 153: ...Control macros 153...
Page 160: ...160...
Page 374: ...374 Parameters...
Page 408: ...408 Additional parameter data...
Page 466: ...466 Fieldbus control through the embedded fieldbus interface EFB...
Page 504: ...504 Control chain diagrams...
Page 508: ...508 Parameterization with drive composer...
Page 512: ...512 Parameterization with automation builder drive manager...






































































