





























Start-up, control with I/O and ID run 23
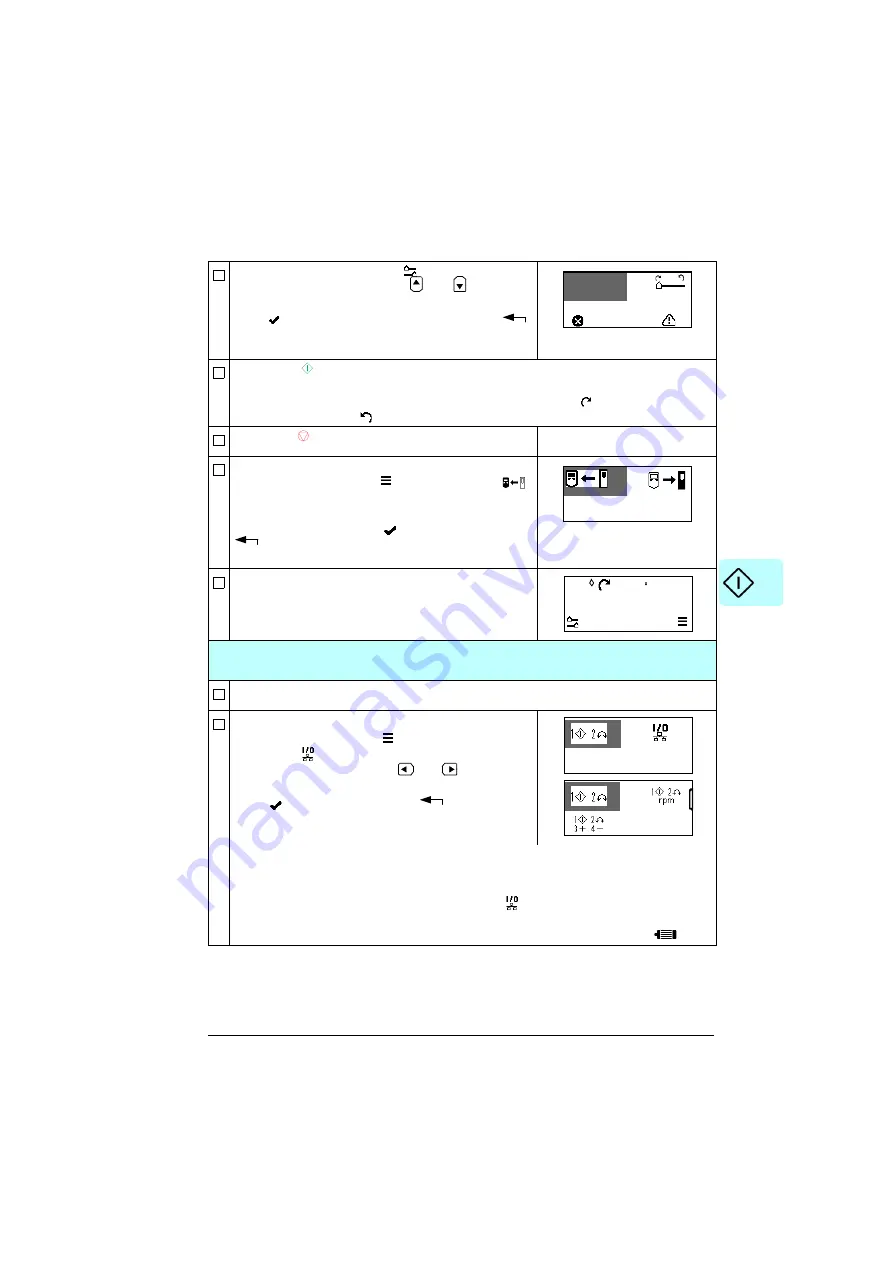
Navigate to the
Options menu
and set the
frequency/speed reference. Use
and
to change
the value.
Press
(
OK
) to accept the new setting, or press
(
Back
) to go back to the previous view without making
changes.
Press
Start
.
Make sure that the motor is running in the required direction. The direction symbol is
displayed in the home page. The forward direction is indicated by
and the reverse
direction is indicated by
.
Press
Stop
.
If you want to make a backup of the settings made so
far, navigate to
Main menu
and select
Backup
.
You can restore and back up the data between drive and
panel.
Select the option and press
(
OK
) to accept or press
(
Back
) to go back to the previous view without
making changes.
The first start setup is complete and the drive is ready for
use. The home view displays the values of selected
signals.
2 – Additional settings
Macro/start-stop reference, ramp, and limit settings
You can make any additional changes to the macro, ramp, and limits, if required.
Macro settings
Navigate to the
Main menu
and select
I/O
connection
.
Select the desired macro. Use
and
to move the
cursor left and right.
Press
(
OK
) to accept or press
(
Back
) to go
back to the previous view without making changes.
Notes:
• Changing the macro resets all settings to the default values of the selected macro and
updates the I/O signals used in the drive.
You can see the currently used I/O signals
in the
menu.
• All macros, except the ABB standard (vector) and Pharma macro, use scalar motor
control by default.You can change the motor control mode in the
Motor data
.
0.0Hz
0
0
Loc
10.0 Hz
0.00
Hz
I
PID
Summary of Contents for ACS560
Page 1: ...ABB GENERAL PURPOSE DRIVES ACS560 standard control program Firmware manual...
Page 4: ...4...
Page 30: ...30 Start up control with I O and ID run...
Page 32: ...32 Using the control panel...
Page 100: ...100 Program features...
Page 153: ...Control macros 153...
Page 160: ...160...
Page 374: ...374 Parameters...
Page 408: ...408 Additional parameter data...
Page 466: ...466 Fieldbus control through the embedded fieldbus interface EFB...
Page 504: ...504 Control chain diagrams...
Page 508: ...508 Parameterization with drive composer...
Page 512: ...512 Parameterization with automation builder drive manager...