





























364 Parameters
Sets gain for slip compensation (in %) while drive is operating
in scalar control mode.
• A squirrel-cage motor slips under load. Increasing the
frequency as the motor torque increases compensates for
the slip.
• Requires parameter
0 = No slip compensation.
1...200 = Increasing slip compensation. 100% means full slip
compensation according to parameters
.
0
0...200 %
Slip compensation in %.
1 = 1%
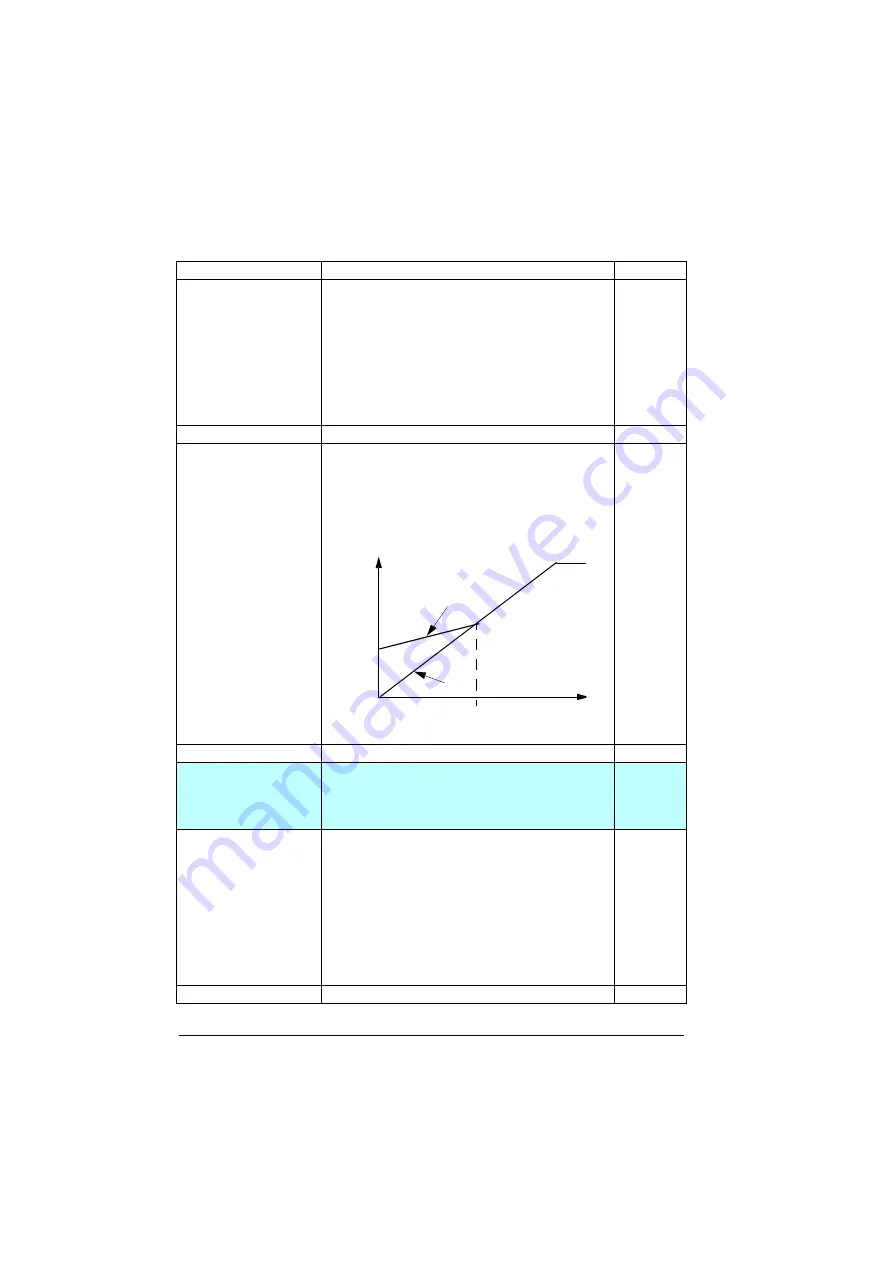
Sets the frequency at which IR compensation (set by
parameter
) reaches 0 V. The unit is %
of motor nominal frequency.
IR compensation
When enabled, IR compensation provides an extra voltage
boost to the motor at low speeds. Use IR compensation, for
example, in applications that require a high breakaway
torque.
80.0
1.0...200.0 %
IR compensation maximum frequency in %.
1 = 1%
Motor values supplied by the user that are used in the motor
model.
These parameters are useful for non-standard motors, or to
just get more accurate motor control of the motor on site. A
better motor model always improves the shaft performance.
Activates the motor model parameters
.
Notes
:
• Parameter value is automatically set to zero when ID run is
selected by parameter
. The values
of parameters
are then updated according to
the motor characteristics identified during the ID run.
• Measurements made directly from the motor terminals
during the ID run are likely to produce slightly different
values than those on a data sheet from a motor
manufacturer.
• This parameter cannot be changed while the drive is
running.
Not selected
Parameters
inactive.
0
No.
Name/Value
Description
Def/FbEq16
A
B
A = IR compensated
B = No compensation
f (Hz)
Motor voltage
Summary of Contents for ACS560
Page 1: ...ABB GENERAL PURPOSE DRIVES ACS560 standard control program Firmware manual...
Page 4: ...4...
Page 30: ...30 Start up control with I O and ID run...
Page 32: ...32 Using the control panel...
Page 100: ...100 Program features...
Page 153: ...Control macros 153...
Page 160: ...160...
Page 374: ...374 Parameters...
Page 408: ...408 Additional parameter data...
Page 466: ...466 Fieldbus control through the embedded fieldbus interface EFB...
Page 504: ...504 Control chain diagrams...
Page 508: ...508 Parameterization with drive composer...
Page 512: ...512 Parameterization with automation builder drive manager...







































































