





























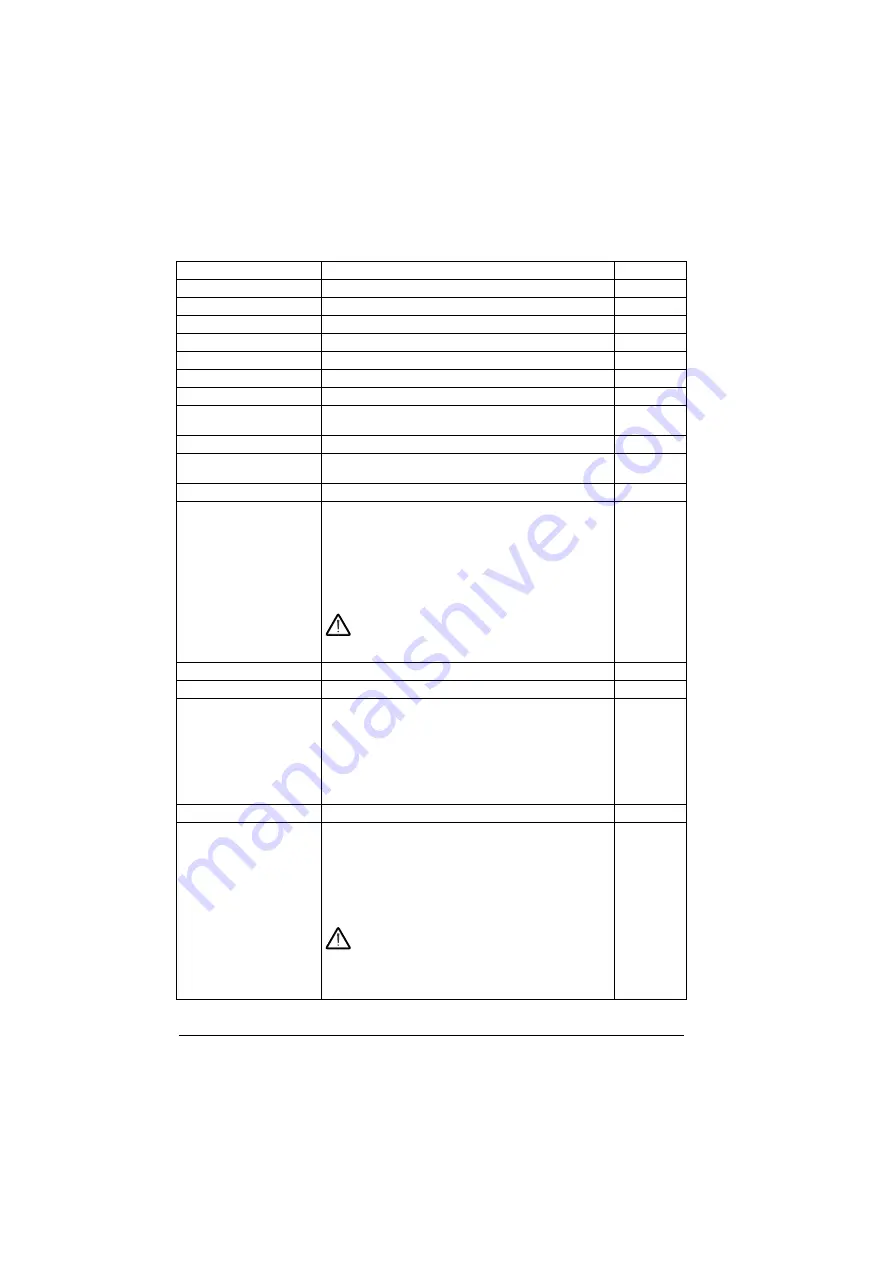
214 Parameters
Supervision 1
Supervision 2
9
Supervision 3
10
Timed function 1
(see page
11
Timed function 2
(see page
12
Timed function 3
(see page
13
Source selection (see
) -
Time delay before pre-heating starts after the drive is
stopped.
60 s
10...3000 s
Pre-heating time delay.
1 = 1 s
Defines the DC current used to heat the motor. The value is in
percent of the nominal motor current.
0.0
0.0…30.0%
Pre-heating current.
1 = 1
The motor can be automatically started after a short supply
power failure using the automatic restart function. See section
(page
When this parameter is set to 0.0 seconds, automatic
restarting is disabled. Otherwise, the parameter defines the
maximum duration of the power failure after which restarting
is attempted. Note that this time also includes the DC
precharging delay.
WARNING!
Before you activate the function, make
sure that no dangerous situations can occur. The
function restarts the drive automatically and continues
operation after a supply break.
10.0
0.0 s
Automatic restarting disabled.
0
0.1…10.0 s
Maximum power failure duration.
1 = 1
Selects the motor start function for the scalar motor control
mode, ie. when
is set to
.
Notes
:
• The start function for the vector motor control mode is
selected by parameter
.
• This parameter cannot be changed while the drive is
running.
(page
Normal
Immediate start from zero speed.
0
Const time
The drive pre-magnetizes the motor before start. The pre-
magnetizing time is defined by parameter
. This mode should be selected if constant
pre-magnetizing time is required (e.g. if the motor start must
be synchronized with the release of a mechanical brake).
This setting also guarantees the highest possible break-away
torque when the pre-magnetizing time is set long enough.
Note:
This mode cannot be used to start into a rotating motor.
WARNING!
The drive will start after the set pre-
magnetizing time has passed even if motor
magnetization is not completed. In applications where
a full break-away torque is essential, ensure that the constant
magnetizing time is long enough to allow generation of full
magnetization and torque.
1
No.
Name/Value
Description
Def/FbEq16
Summary of Contents for ACS560
Page 1: ...ABB GENERAL PURPOSE DRIVES ACS560 standard control program Firmware manual...
Page 4: ...4...
Page 30: ...30 Start up control with I O and ID run...
Page 32: ...32 Using the control panel...
Page 100: ...100 Program features...
Page 153: ...Control macros 153...
Page 160: ...160...
Page 374: ...374 Parameters...
Page 408: ...408 Additional parameter data...
Page 466: ...466 Fieldbus control through the embedded fieldbus interface EFB...
Page 504: ...504 Control chain diagrams...
Page 508: ...508 Parameterization with drive composer...
Page 512: ...512 Parameterization with automation builder drive manager...







































































