





























■
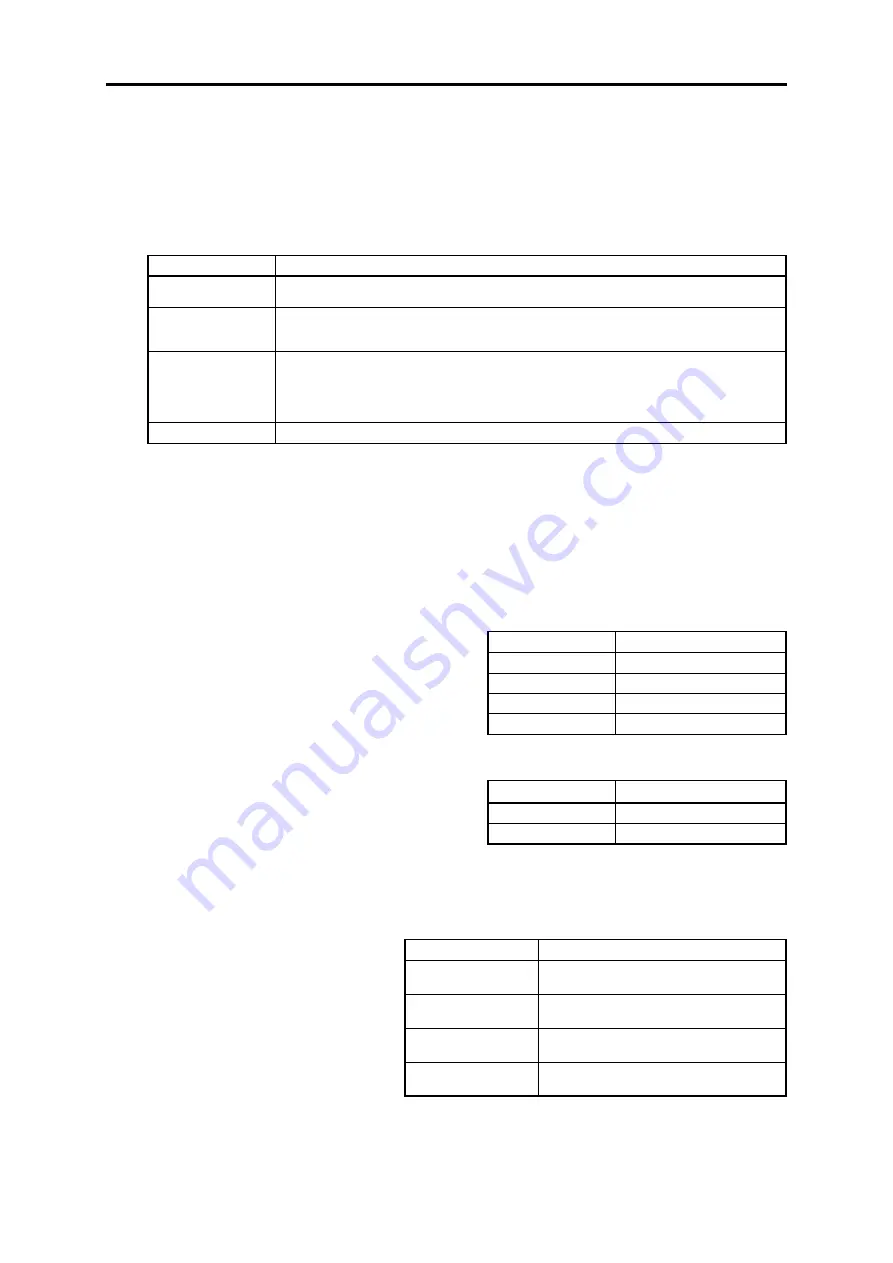
Communications error processing (y02, y12)
Select an operation when an error occurs in the RS-485 communication.
The RS-485 errors are logical errors such as address error, parity error and framing error,
transmission errors and disconnection errors (the latter specified in y08 and y18). These errors occur
only when the inverter is configured to receive the operation command or frequency command via
the RS-485 communication. If the operation command or frequency command is not issued via the
RS-485 communication, or when the inverter is stopped, the system does not determine an error.
y02, y12 data
Function
0
Displays the RS-485 communication error (
Er8
for y02,
ErP
for y12), and
immediately stops the operation (trip by alarm).
1
Operates for a period specified in the error process timer (y03, y13), and then
displays the RS-485 communication error (
Er8
for y02,
ErP
for y12), and stops
the operation (trip by alarm).
2
Retries the communication for a period specified in the error process timer (y03,
y13), and if the communication is recovered, the operation continues. If the
communication is not recovered within the period specified in the error process
timer, displays the RS-485 communication error (
Er8
for y02,
ErP
for y12) and
stops the operation (trip by alarm).
3
Continues the operation if a communication error occurs.
For details, refer to the RS-485 Communication User’s Manual.
■
Error process timer (y03, y13)
Sets the error process timer, as explained above for the communications error processing parameters
(y02, y12). Refer also to the section of disconnection detection time (y08, y18).
-Data setting range: 0.0 to 60.0 (s)
■
Baud rate (y04, y14)
Sets the transmission baud rate.
•
For inverter supporting loader (via RS-485):
Match the value with the computer setting.
y04 and y14 data
Function
1
4800 bps
2
9600 bps
3
19200 bps
4
38400 bps
■
Data length selection (y05, y15)
Sets the character length.
•
For inverter supporting loader (via RS-485):
The value does not need to be set since it
automatically becomes 8 bits. (It also applies to
Modbus RTU.)
y05 and y15 data
Function
0
8 bits
1
7 bits
■
Parity selection (y06, y16)
Sets the parity.
•
For inverter supporting loader (via
RS-485): The value does not need
to be set since it automatically
becomes even parity.
y06 and y16 data
Function
0
No parity bit
(2 stop bits for Modbus RTU)
1
Even parity
(1 stop bit for Modbus RTU)
2
Odd parity
(1 stop bit for Modbus RTU)
3
No parity bit
(1 stop bit for Modbus RTU)
2-134
Содержание Frenic lift
Страница 1: ...LM2A series Reference Manual INR SI47 1909a E...
Страница 7: ......
Страница 13: ......
Страница 51: ...2 38...
Страница 221: ......
Страница 242: ...3 4 Programming Mode Chap 3 OPERATION USING TP A1 LM2 Figure 3 14 Screen transition for Op Monitor display example 3 21...
Страница 252: ......
Страница 254: ...URL http www fujielectric com...







































































