





























Detailed description
2.4 Closed-loop control
Basic logic functions: Velocities, Setpoint/Actual Value Systems, Closed-Loop Control (G2)
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
61
Servo gain factor (K
v-
) setting for SINUMERIK 840D/810D
W
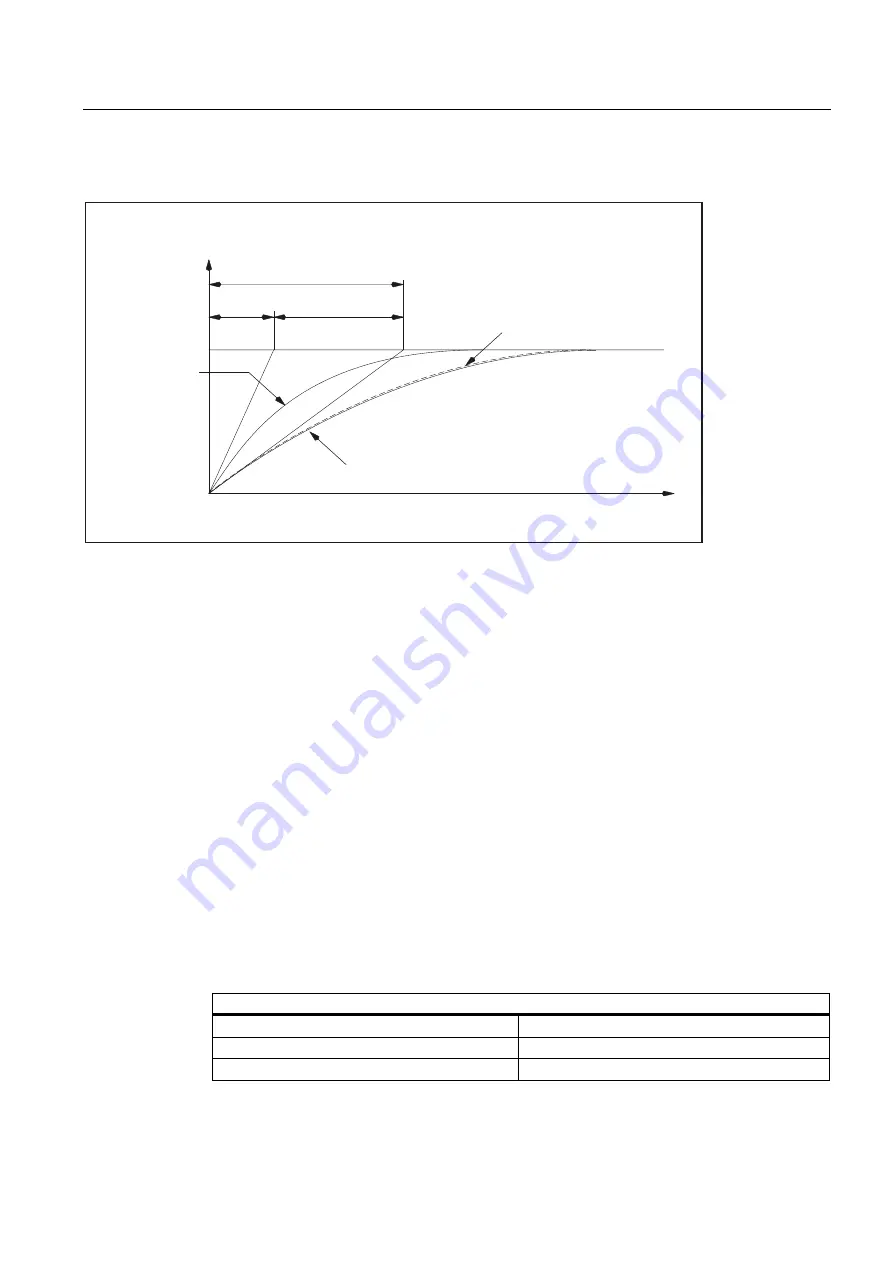
'<1B0$7&+B7,0( $[LV>$[LV@
$[LVZLWKKLJKVHUYRJDLQ
DQGG\QDPLFUHVSRQVHDGDSWDWLRQ
$[LVHTXLYWLPH
6WHSUHVSRQVH
RIWKHSRVLWLRQ
FRQWUROORRS
$[LVZLWK
KLJKVHUYR
JDLQ
$[LVZLWKORZVHUYRJDLQ
(TXLYWLPH
Figure 2-13 Dynamic response adaptation
Dynamic response adaptation
The purpose of dynamic response adaptation is to set an identical following error for axes
with different servo gain factors (K
v
). The optimum contour accuracy for axes interpolating
with each other can thus be achieved without reduced control quality. A high servo gain
factor (K
v
) for an axis can be maintained, which guarantees optimum disturbance
suppression of the axis.
The function is activated via machine data:
MD32900 $MA_DYN_MATCH_ENABLE (dynamic response adaptation).
Axes are adapted via machine data:
MD32910 $MA_DYN_MATCH_TIME[n] (dynamic response adaptation time constant).
With this MD, the equivalent time constant of the position control loop of the axes with a
higher servo gain factor (K
v
) is matched to the axis with the lowest servo gain factor (K
v
).
The difference between the equivalent time constants of the "slowest" control loop and the
relevant axis is entered in machine data:
MD32910 $MA_DYN_MATCH_TIME[n].
Example of dynamic response adaptation of axes 1, 2 and 3 (without speed feedforward
control):
The equivalent time constant of the position control loop is as follows:
For axis 1:
30 ms
For axis 2:
20 ms
For axis 3:
24 ms
⇒ Axis 1 is dynamically the slowest axis
Summary of Contents for SINUMERIK 840D sl
Page 282: ...Index Basic logic functions Acceleration B2 64 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 388: ...Basic logic functions Travel to fixed stop F1 Function Manual 11 2006 6FC5397 0BP10 2BA0 52 ...
Page 962: ...Index Basic logic functions Emergency Stop N2 20 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 1704: ...Constraints Basic logic functions Spindles S1 94 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 1716: ...Index Basic logic functions Spindles S1 106 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 1996: ...Index Basic logic functions Tool Offset W1 208 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 2150: ...Table of contents Basic logic functions Appendix 4 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 2184: ...Glossary Basic logic functions Appendix 38 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...







































































