





























Functions
2.17 Jerk filter (axis-specific)
Basic logic functions: Acceleration (B2)
40
Function Manual, 11/2006, 6FC5397-0BP10-2BA0
Mode: Sliding mean value generation
Where minimal contour deviations are required, filter time constants within the range of 20-
40 ms can be set using the "sliding mean value generation" filter mode. The smoothing effect
is largely symmetrical.
The display of the calculated servo gain factor (KV factor), e.g. in the HMI Advanced "Axis"
service screen, shows smaller values than would normally be expected for the filter. The
contour accuracy is in fact higher than the displayed KV filter appears to suggest.
When changing from "2nd-order filter" to "sliding mean value generation" filter mode, the
displayed KV factor may, therefore, drop (with identical filter time constant), even though
there is an improvement in contour accuracy.
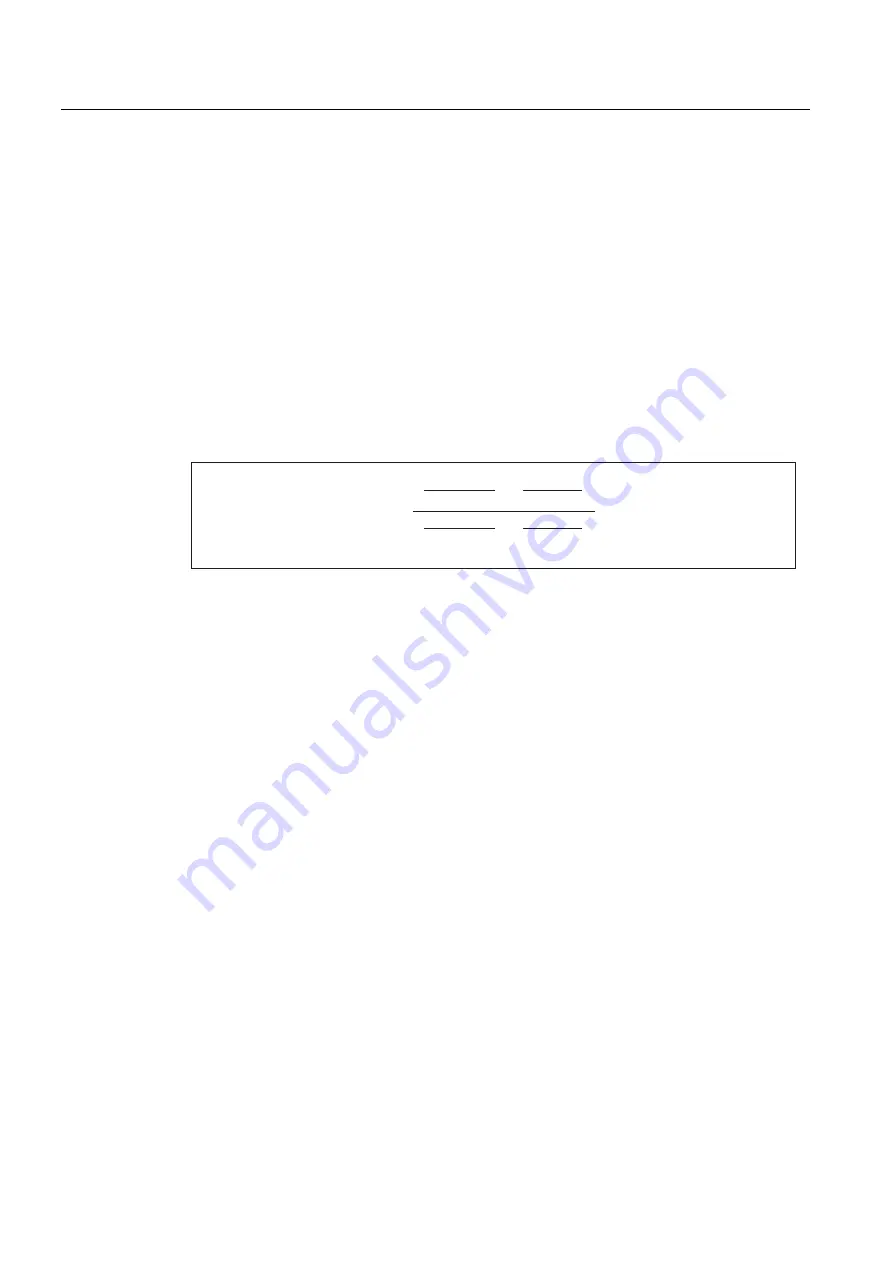
Mode: Bandstop filter
The bandstop filter is a 2nd-order filter in terms of numerator and denominator:
+V
V
V
˭I
˭I
=
=
˭I
1
V'
=
˭I
1
V'
1
where:
f
Z
:
Numerator natural freq.
f
N
:
Denominator natural freq.
D
Z
:
Numerator damping
D
N
:
Denominator damping
Since a vibration-capable filter setting is not expected to yield useful results in any case, as
with the jerk filter's "2nd-order filter" (PT2) low-pass filter (PT2) mode there is no setting
option for the denominator damping D
N
. The denominator damping D
N
is permanently set to
1.
The bandstop filter can be parameterized in 2 different ways:
•
Real bandstop filter
•
Bandstop filter with additional amplitude response increase/decrease at high frequencies
Real bandstop filter
The real bandstop filter is applied when identical numerator and denominator natural
frequencies are selected:
•
f
Z
= f
N
= f
block
(blocking frequency)
If numerator damping setting = 0 is selected, the blocking frequency is equivalent to
complete attenuation. In this case the 3 dB bandwidth is calculated as follows:
•
f
3 dB bandwidth
= 2 * f
block
If instead of complete attenuation, a reduction by a factor of k is all that is required, then
numerator damping should be selected in accordance with k. In this case the above formula
for calculating the 3 dB bandwidth no longer applies.
Summary of Contents for SINUMERIK 840D sl
Page 282: ...Index Basic logic functions Acceleration B2 64 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 388: ...Basic logic functions Travel to fixed stop F1 Function Manual 11 2006 6FC5397 0BP10 2BA0 52 ...
Page 962: ...Index Basic logic functions Emergency Stop N2 20 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 1704: ...Constraints Basic logic functions Spindles S1 94 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 1716: ...Index Basic logic functions Spindles S1 106 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 1996: ...Index Basic logic functions Tool Offset W1 208 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 2150: ...Table of contents Basic logic functions Appendix 4 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...
Page 2184: ...Glossary Basic logic functions Appendix 38 Function Manual 11 2006 6FC5397 0BP10 2BA0 ...







































































