





























Appendix 1 Parameter table
APPENDIX 357
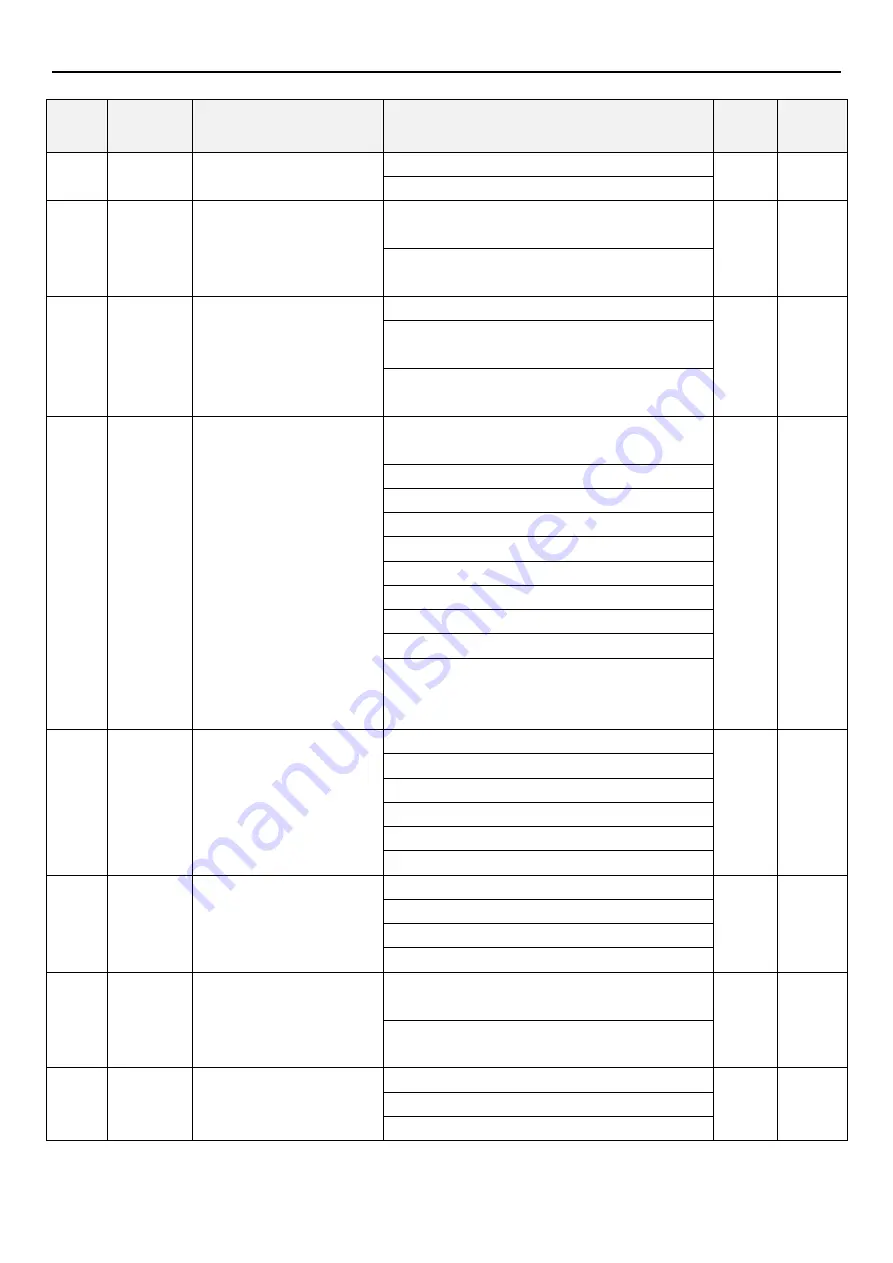
Group
Parameter
Number
Name
Setting Range
Default
Page
00-13
P.71
Idling brake / DC brake
0: Idling brake
1
92
1: DC brake
00-14
P.75
Stop function selection
0: Press STOP button and inverter stop running in
PU and H2 mode
1
1: Press STOP button and inverter stop running in all
mode.
00-15
P.78
Prevent forward/reverse
rotation selection
0: Forward/reverse rotation are both permitted.
0
1: Prevent reverse rotation (Giving reverse signal
decelerates and stops the motor).
2: Prevent forward rotation (Giving forward signal
decelerates and stops the motor).
00-16
P.79
Operation mode selection
0: “PU mode”, “external mode” and “Jog mode” are
interchangeable.
0
1: “PU mode” and “JOG mode” are interchangeable.
2: “External mode” only
3: “Communication mode” only
4: “Combined mode 1”
5: “Combined mode 2”
6: “Combined mode 3”
7: “Combined mode 4
8: “Combined mode 5”
99999: Second operation mode, run command is set
by 00-18(P.109), target frequency is set by
00-17(P.97)
00-17
P.97
Second target frequency
selection
0: Frequency set by keypad
0
1: Frequency set by
RS485 communication
2: Frequency set by analog input
3: Frequency set by communication expansion card
4: Frequency set by PG card A2 B2
5: Frequency set by HDI pulse
00-18
P.109
Second start signal selection
0: Start signal set by keypad
0
1: Start signal set by digital input terminal
2: Start signal set by
RS485 communication
3: Start signal set by communication expansion card
00-19
P.35
Communication mode
selection
0: In communication mode, run signal and frequency
is given by communication.
0
1: In communication mode, run signal and frequency
is given by external signal.
00-20
P.400
Control mode selection
0: Speed control
0
1: Torque control
2: Position control







































































