





























External Signal Exchange
84/121
Operating Manual dryve D1, ST-, DC-, EC/BLDC-Motor Control System - V2.4
Command
Bit assignment, Controlword 6040h
Transitions
Bit 7
Bit 3
Bit 2
Bit 1
Bit 0
Shutdown
0
X
1
1
0
2, 6, 8
Switch On
0
0
1
1
1
3
Switch On and Enable Operation1
0
1
1
1
1
3, 4
Disable Voltage
0
X
X
0
X
7, 9, 10, 12
Quick Stop
0
X
0
1
X
7, 10, 11
Disable Operation
0
0
1
1
1
5
Enable Operation
0
1
1
1
1
4, 16
Fault Reset
1
X
X
X
X
15
1
Automatic transition to Enable Operation after Switch On has been set
Note
After passing through the State Machine successfully and obtaining the state “Operation enabled” the Bits 0, 1, 2 and 3 must
be sent with each Controlword telegram to maintain the state “Operation enabled”
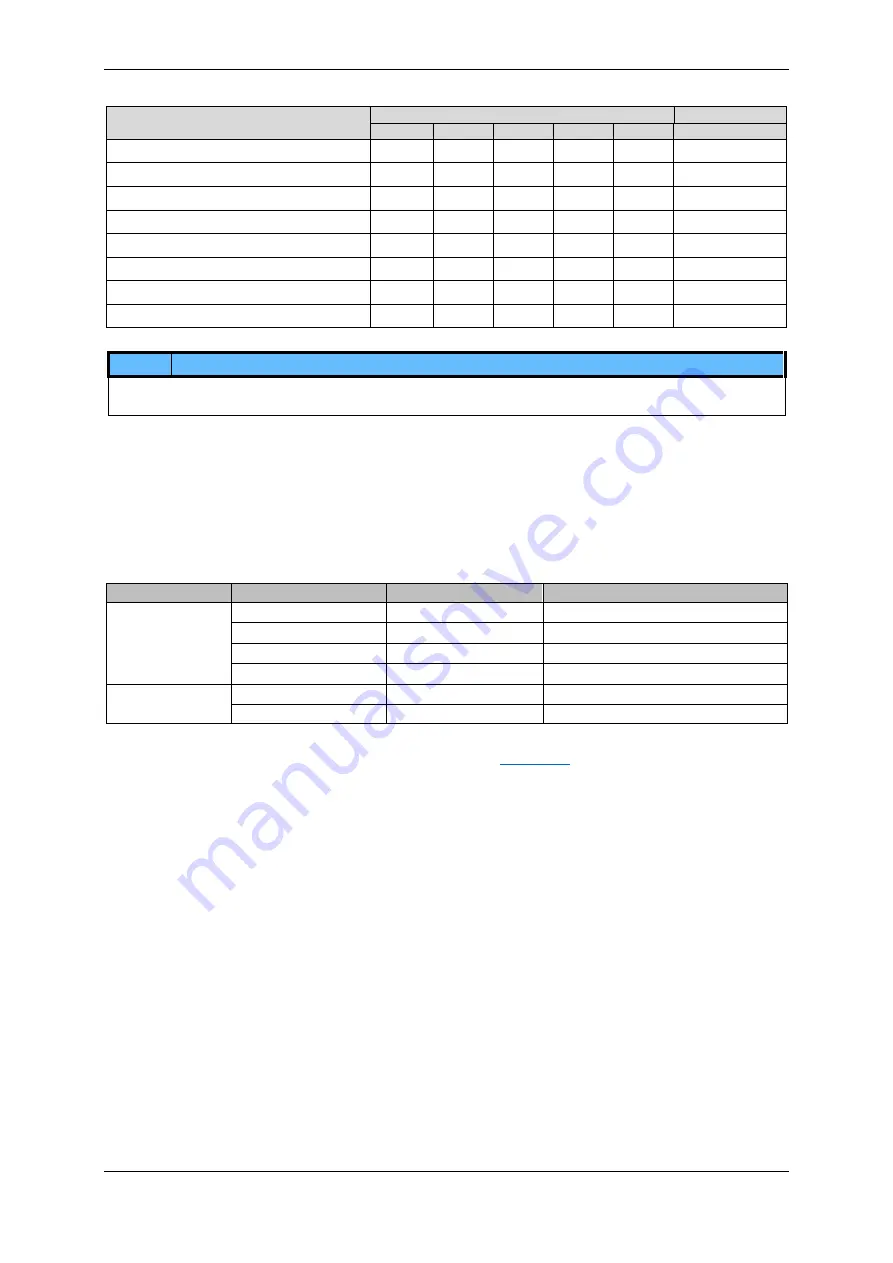
6.4.5 Necessary User Interface Settings
The following objects/parameters must be set in the user interface of the dryve D1.
“Motor” page
All parameters relevant to the motor must be set in the user interface.
“Axis” page
The maximum value must be set for each of the following parameters.
Group
Parameter
CANopen object
Value set at user interface
Motion Limits
Available Stroke
No object available
1.000.000
Max. Velocity
No object available
100.000
Jog Velocity
No object available
100.000
Max. Acceleration
No object available
1.000.000
Reference
Method
6098h Homing Method
Selection
Offset
607Ch Home Offset
0
– 1.000.000 (application-specific)
“Communication” page
Parameterization and activation of the CANopen communication interface
“Drive Profile” page
Setting the dominance via the dropdown menu to allow the CANopen master to execute movements.







































































