





























C h a p t e r 3 D e v i c e s
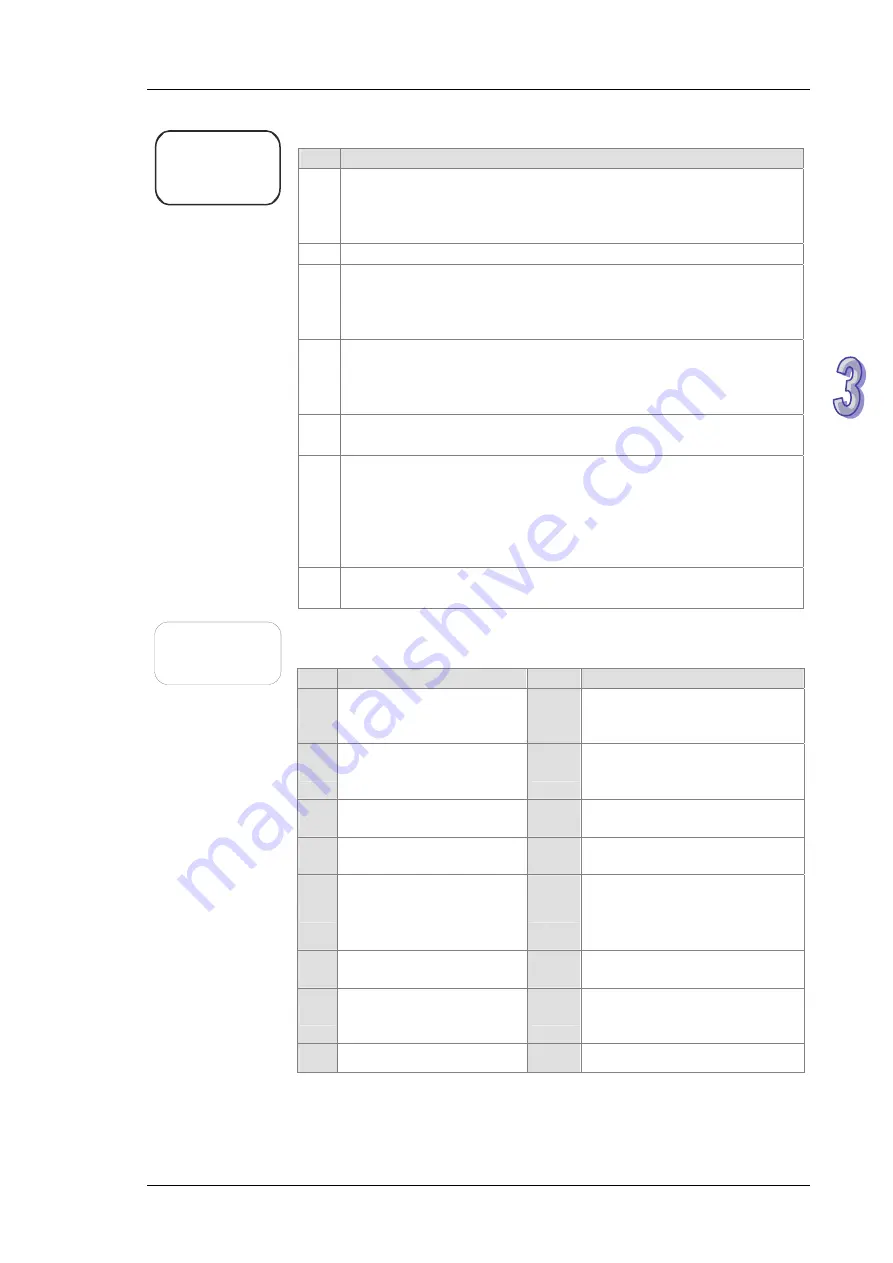
Se tt in g t he
p ara mete rs
of th e ax is
SRmn00
(SR1000, SR1100,
…...SR2500)
*3:
bit#
Description
8
Bit 8=0: The value indicating the present position of the axis
decreases progressively.
Bit 8=1: The value indicating the present position of the axis
increases progressively.
9
Bit 9=0: Normal mode ; bit 9=1: Overwrite mode
10
Bit 10=0: The return to home is triggered by a transition in DOG’s
signal from high to low.
Bit 10=1: The return to home is triggered by a transition in DOG’s
signal from low to high.
11
Bit 11=0: When the motor rotates clockwise, the value indicating the
present position of the axis increases.
Bit 11=1: When the motor rotates clockwise, the value indicating the
present position of the axis decreases.
12
Bit 12=0: Absolute coordinates
Bit 12=1: Relative coordinates
13
Bit 13=0: The calculation of the target position of the axis is triggered
by a transition in DOG’s signal from low to high.
Bit 13=1: The calculation of the target position of the axis is triggered
by a transition in DOG’s signal from high to low.
(The setting of bit 13 is applicable to the insertion of single-speed
motion, and the insertion of two-speed motion.)
14
Bit 14=0: Trapezoid curve
Bit 14=1: S curve
O pera tion
c ommand
SRmn30
(SR1030, SR1130,
…...SR2530)
SR1030 is for the first axis, SR1130 is for the second axis, SR1230 is for the
third axis, SR1330 is for the fourth axis, ……, SR2430 is for the fifteenth axis,
and SR2530 is for the sixteenth axis.
bit#
Operation command
bit#
Operation command
0
The motion of the axis
specified is stopped by
software.
8
A mode of single-speed motion
is activated.
1
-
9
A mode of inserting
single-speed motion is
activated.
2
The axis specified
operates in JOG+ mode.
10
A mode of two-speed motion is
activated.
3
The axis specified
operates in JOG- mode.
11
A mode of inserting two-speed
motion is activated.
4
A mode of variable motion
is activated.
12
0: The execution of the Ox
motion subroutine set stops.
1: The execution of the Ox
motion subroutine set starts.
5
A manual pulse generator
is operated.
13
-
6
A mode of triggering the
return to home is
activated.
14
-
7
-
15
-
The input terminals for the manual pulse generator MPG are X0.8+, X0.8-,
X0.9+, and X0.9-.
3 - 3 9
Содержание AH500
Страница 9: ...viii...
Страница 52: ...Chapter 2 Hardware Specifications and Wiring Wiring AH10PM 5A and a Panasonic CN5 series servo drive 2 31...
Страница 53: ...AH500 Motion Control Module Manual Wiring AH10PM 5A and a Yaskawa servo drive 2 32...
Страница 54: ...Chapter 2 Hardware Specifications and Wiring Wiring AH10PM 5A and a Mitsubishi MJR2 series servo drive 2 33...
Страница 55: ...AH500 Motion Control Module Manual Wiring AH10PM 5A and a Fuji servo drive 2 34...
Страница 115: ...AH500 Motion Control Module Manual 4 16 MEMO...
Страница 375: ...AH500 Motion Control Module Manual 5 260 MEMO...
Страница 376: ...Chapter 6 Data Transmission Table of Contents 6 1 Functions 6 2 6 2 Parameters 6 2 6 3 Usage 6 5 6 1...
Страница 383: ...AH500 Motion Control Module Manual 6 8 MEMO...
Страница 419: ...AH500 Motion Control Module Manual 7 36 MEMO...
Страница 436: ...Chapter 8 Electronic Cam 8 17...
Страница 482: ...Chapter 10 High speed Counters and High speed Timers 3 The cyclic mode is used to measure a frequency 10 7...
Страница 483: ...AH500 Motion Control Module Manual 10 8 MEMO...
Страница 505: ...AH500 Motion Control Module Manual 12 8 MEMO...
Страница 515: ...AH500 Motion Control Module Manual 13 10 MEMO...
Страница 544: ...Appendix A Error Code Table Table of Contents A 1 Error Code Table A 2 A 1...
Страница 547: ...AH500 Motion Control Module Manual A 4 MEMO...







































































