





























C h a p t e r 5 A p p l i e d I n s t r u c t i o n s
API
Instruction code
Operand
Function
50
REF
P
D, n
Refreshing the states of
I/O devices
Device
X
Y
M
S
K
16#
F
KnM KnS
D
W
T
C
V
Z
D
n
Pulse instruction 16-bit instruction (5 steps) 32-bit instruction
–
E xp la nat io n
The states of I/O devices are not refreshed until the instruction END is
executed. When the scan of a program starts, the states of external
inputs are read, and stored in the input memory. After the instruction
END is executed, the contents of the output memory will be sent to
output terminals. Therefore, users can use this instruction when they
need the latest I/O data in an operation process.
D
: Initial I/O device whose state is refreshed;
n
: Number of I/O devices
whose states are refreshed
D must be an I/O device whose number ends with 0, e.g. X0.0, X1.0,
Y0.0 or Y1.0. The instruction can not be used to refresh the I/O devices
in a digital extension module.
D
must be an I/O device in a PLC.
If
D
is X0.0 and n is less than or equal to 8, the states of X0.0~X0.7
will be refreshed. If
n
is greater than 8, the states of the input
devices and the states of the output devices in the motion control
module used will be refreshed.
If
D
is Y0.0, and
n
is less than or equal to 8, the states of Y0.0~Y07
will be refreshed. If
n
is greater than 8, the states of the input
devices and the states of the output devices in the motion control
module used will be refreshed.
n
is in the range of 4 to the number of I/O devices in the motion control
module used, and is a multiple of 4.
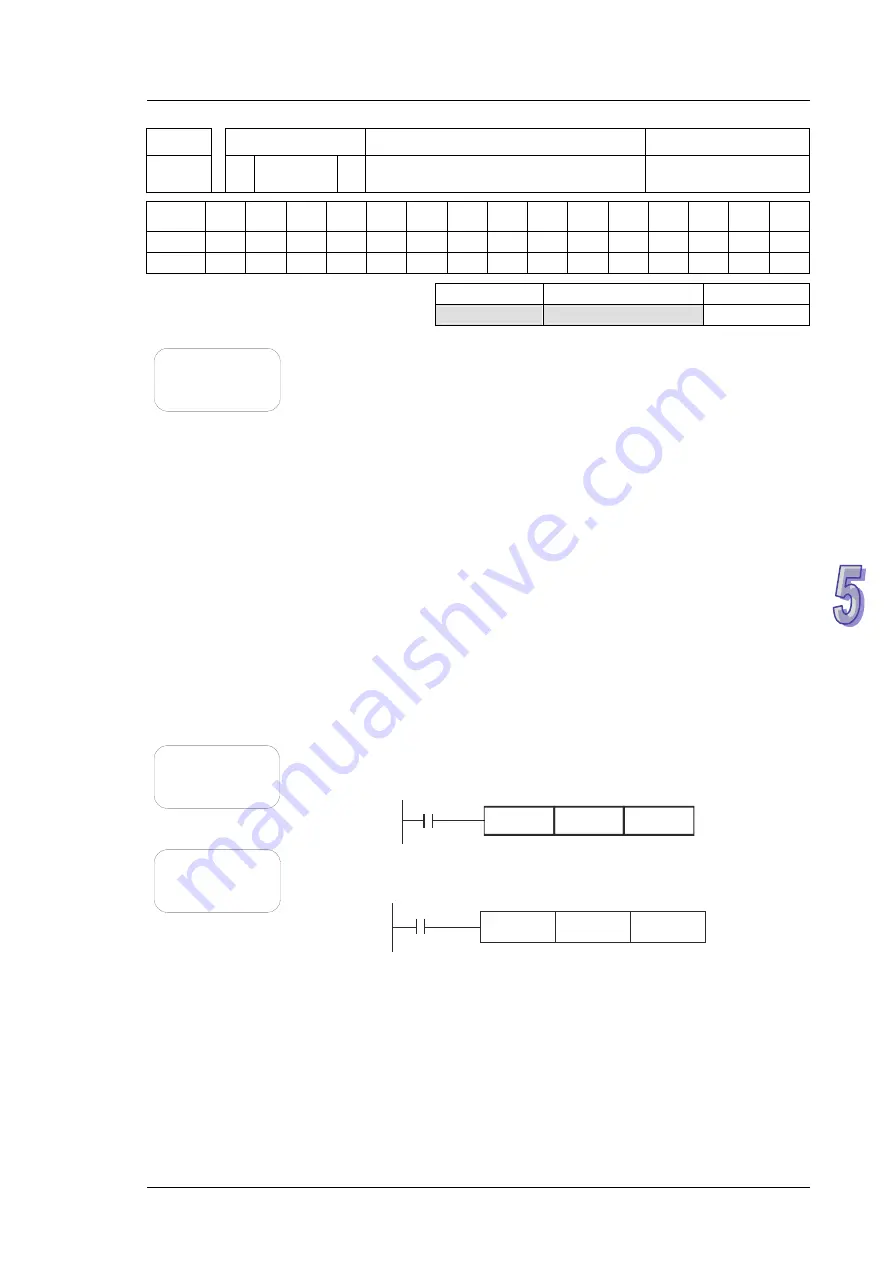
E xamp le 1
When X0.0 is ON, the AH500 motion control module reads the states of
X0.0~X0.7 immediately. The input signals are refreshed without any
delay.
X0.0
REF
X0.0
K8
E xamp le 2
When X0.0 is ON, the states of Y0.0~Y0.7 are sent to output terminals.
The output signals are refreshed immediately without the need to wait
for the execution of the instruction END.
X0.0
REF
Y0.0
K4
5 - 6 9
Содержание AH500
Страница 9: ...viii...
Страница 52: ...Chapter 2 Hardware Specifications and Wiring Wiring AH10PM 5A and a Panasonic CN5 series servo drive 2 31...
Страница 53: ...AH500 Motion Control Module Manual Wiring AH10PM 5A and a Yaskawa servo drive 2 32...
Страница 54: ...Chapter 2 Hardware Specifications and Wiring Wiring AH10PM 5A and a Mitsubishi MJR2 series servo drive 2 33...
Страница 55: ...AH500 Motion Control Module Manual Wiring AH10PM 5A and a Fuji servo drive 2 34...
Страница 115: ...AH500 Motion Control Module Manual 4 16 MEMO...
Страница 375: ...AH500 Motion Control Module Manual 5 260 MEMO...
Страница 376: ...Chapter 6 Data Transmission Table of Contents 6 1 Functions 6 2 6 2 Parameters 6 2 6 3 Usage 6 5 6 1...
Страница 383: ...AH500 Motion Control Module Manual 6 8 MEMO...
Страница 419: ...AH500 Motion Control Module Manual 7 36 MEMO...
Страница 436: ...Chapter 8 Electronic Cam 8 17...
Страница 482: ...Chapter 10 High speed Counters and High speed Timers 3 The cyclic mode is used to measure a frequency 10 7...
Страница 483: ...AH500 Motion Control Module Manual 10 8 MEMO...
Страница 505: ...AH500 Motion Control Module Manual 12 8 MEMO...
Страница 515: ...AH500 Motion Control Module Manual 13 10 MEMO...
Страница 544: ...Appendix A Error Code Table Table of Contents A 1 Error Code Table A 2 A 1...
Страница 547: ...AH500 Motion Control Module Manual A 4 MEMO...







































































