





























decelerate.
Example: SCARA robot with four axes, each axis utilises a Node 1000.
A 48 V power supply is considered. A 4 kW power supply would be required if all axes need to reach
maximum power at the same time. It is not plausible that all the axes require their maximum power at
the same time. Considering the robot application, usually two axes can move in a pick and place
program at the same time. So in this case a 2 kW power supply could be used. A 20% margin is
preferable, so a 2.4 kW power supply is an appropriate power source.
4.1.2.5 Calculating the amperage
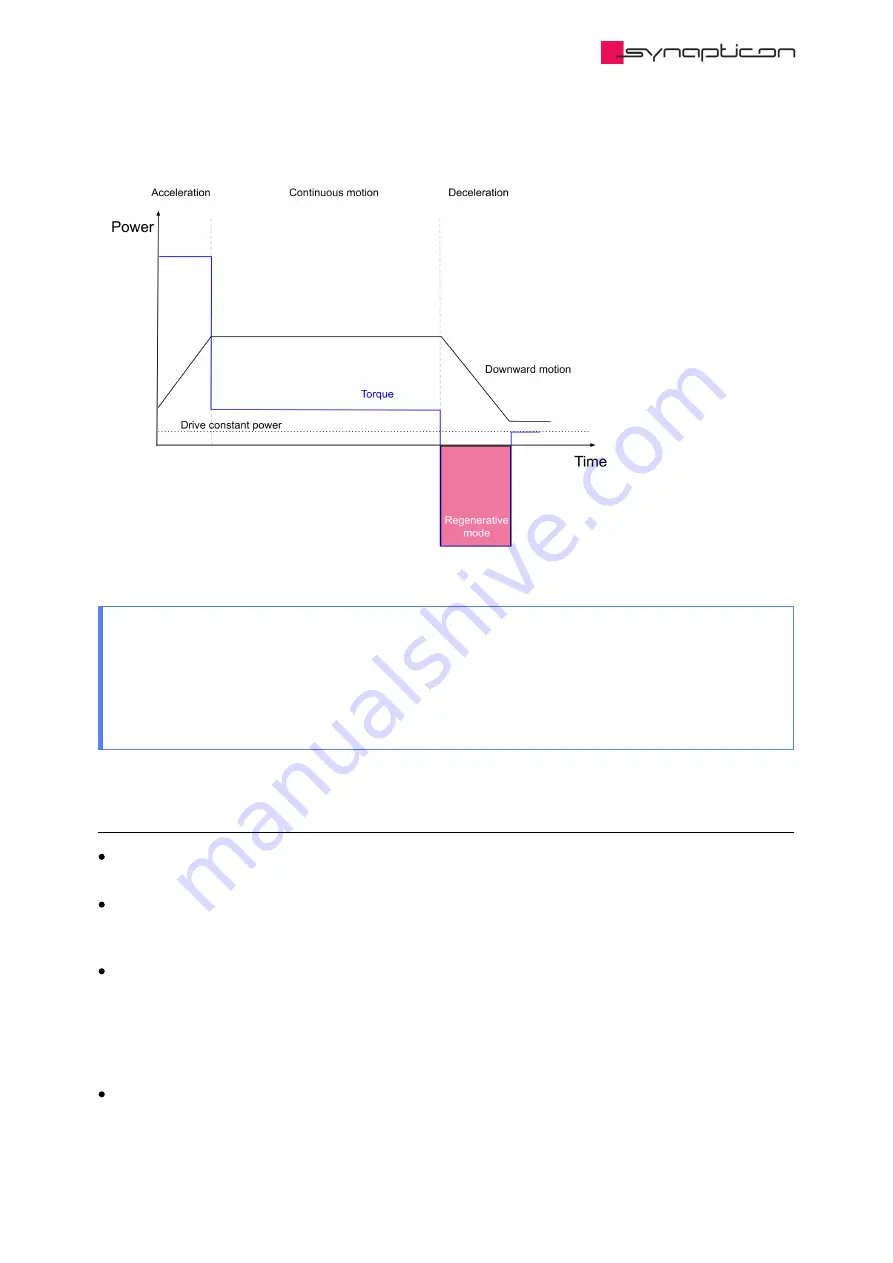
In a single-axis system, the power supply must be able to provide the peak power required by the
application while the real consumption depends on the motors and operating point.
The above-mentioned rule of thumb can be exceeded by no more than 50% in extreme cases, however in
many practical use cases even less power is sufficient. This is particularly the case if high rpm and high
torque are not demanded at the same time, but only separately from each other.
In a multi-axis system with n servo drives, it is typically not required to install n-times the peak power of a
single servo drive. This is because in most multi-axis systems, not all axes go to maximum power
(maximum torque and maximum speed) at the same time. In robot arms, typically only axes 1 and 2
(SCARA) or axes 2 and 3 (5/6/7 axes robots) are sometimes simultaneously consuming close to full power,
so considering the sum of their peak power demands as criteria for the power supply dimensioning is a
good starting point.
Power supply current is derived from the power by
P = U * I
DC
DC
DC
Synapticon Documentation
© 2021 Synapticon GmbH | Daimlerstraße 26 | D-71101 Schönaich Documentation v 4.19.0 | Built 2022-02-01
964/1031







































































