





























1.2.2.3.2.2.2 Limited Range Calibration (Available from OBLAC Drives v21.3.0)
If the target actuator has motion limits, then the
Software Position Limits (Object 0x607D)
has to be
configured before calibration. The calibration motion will be reduced to the specified motion range with 3
degrees of margin on each side. At first, the system will slowly move to the Minimum Software Position Limit
and then start the calibration procedure within the safe range.
During the limited range calibration of an encoder on the gear’s output shaft, a more accurate control of slow
velocities is needed. If the calibration takes too long, consider a sharper velocity tuning (up to 50 Hz of
bandwidth).
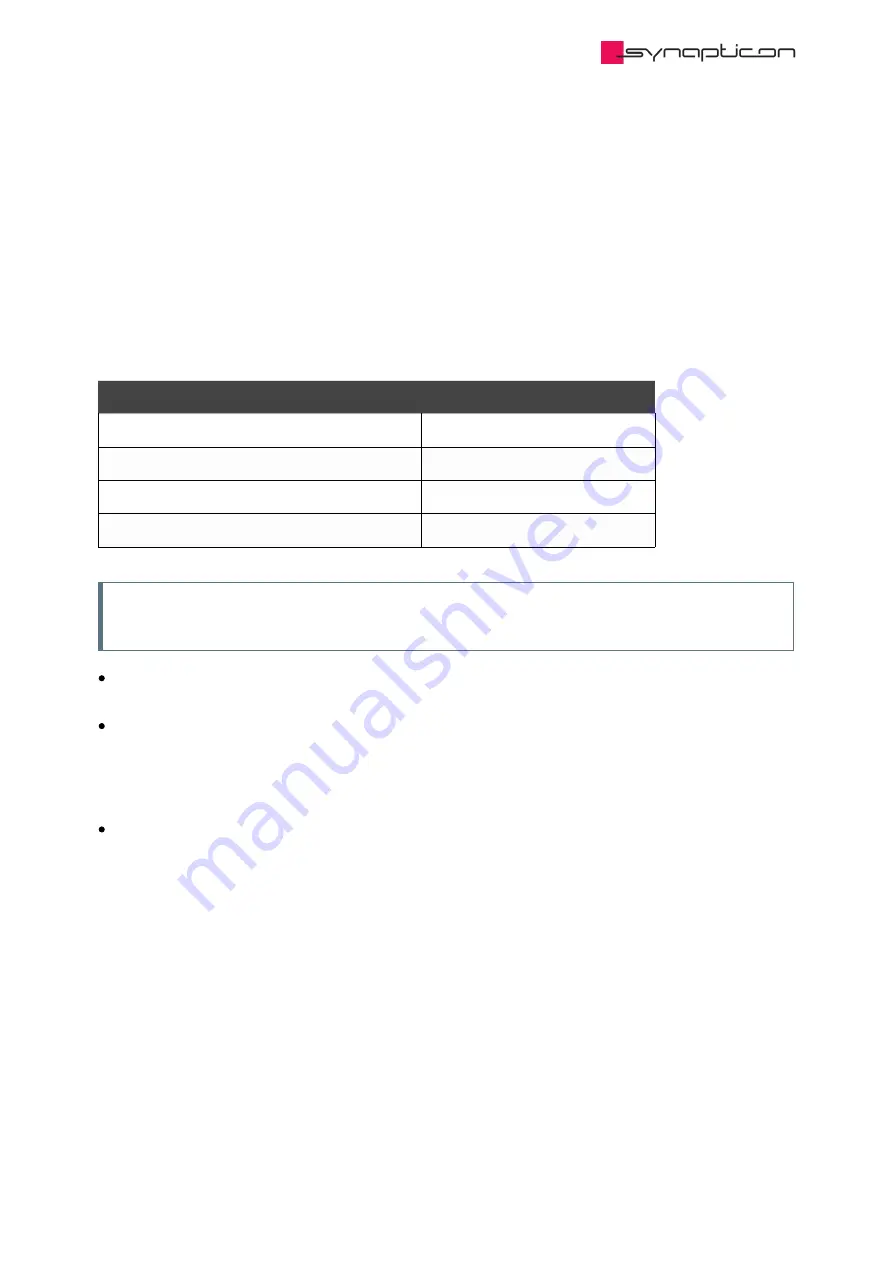
The Limited Range Calibration has a minimum possible motion range:
Encoder
Minimum motion range
Circulo 7, Internal encoder 1 (Inner ring)
7 / gear ratio * 360 [degrees]
Circulo 7, Internal encoder 2 (Outer ring)
7 [revolutions]
Circulo 9, Internal encoder 1 (Inner ring)
5 / gear ratio * 360 [degrees]
Circulo 9, Internal encoder 2 (Outer ring)
5 [revolutions]
Note
The calibration may fail if the safe motion range is smaller than the values above.
If you have ensured that the movement is possible, start the calibration procedure by pressing START
CALIBRATION button
You can abort the procedure at any time.
1.2.2.3.2.2.3 Calibration in Progress
The motor will turn and you will see the progress on the blinking Running iteration n and some updates in
the measurement graphs.
Synapticon Documentation
© 2021 Synapticon GmbH | Daimlerstraße 26 | D-71101 Schönaich Documentation v 4.19.0 | Built 2022-02-01
120/1031





















































