3.1.8.3.3 Anti-Windup Control
When the controller sends signals to the motor to accelerate at a very high rate, it’s possible that the values
are beyond the motor’s capabilities. This is likely to happen in the case of large and long-lasting control
deviations. If the controller has no knowledge about the motor’s physical properties, the signal would remain
saturated, even after the control error has been compensated: the motor would still accelerate at maximum
power, which would result in large overshoot or even instability.
Saturation limits for the integrator are introduced and can be set in the controller options (Integrator
boundaries) to limit the integrator output.
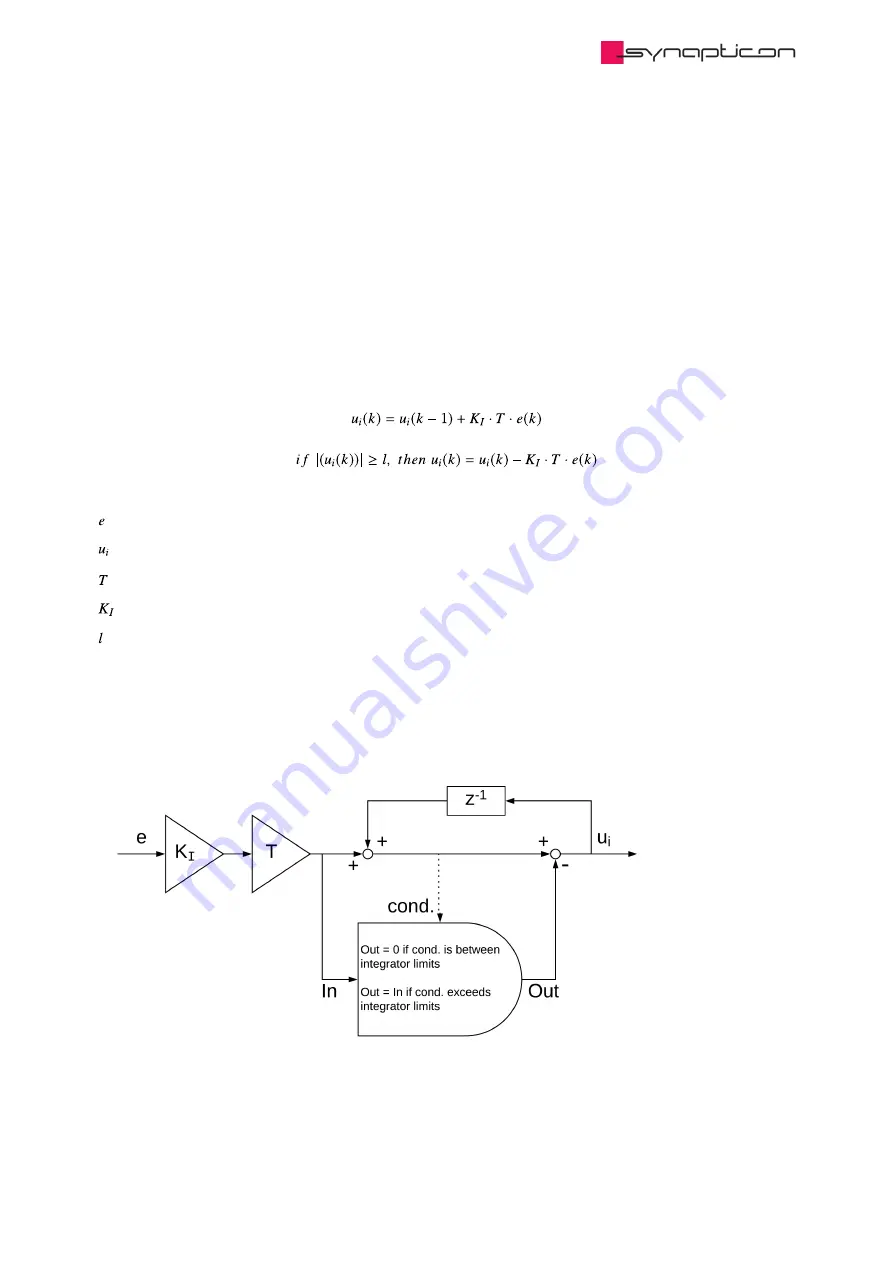
The Anti-windup control algorithm is implemented with the following approach:
with:
: control deviation
: Output of the integral part
: Sample time
: Integral gain
: Integrator limit
Explanation: If the integral part of the controller goes higher than the value of the controller’s output limit,
the value that was previously added to integral is automatically subtracted.
This method is known as “clamping”. It requires no tuning.
Detail view on the integrator branch with anti-windup:
The described implementation of the integration algorithm is used in all motion controllers (both integrators
of the cascaded position controller, integrator of the PID position controller, integrator of the PID velocity
Synapticon Documentation
© 2021 Synapticon GmbH | Daimlerstraße 26 | D-71101 Schönaich Documentation v 4.19.0 | Built 2022-02-01
676/1031