





























Programming guidelines
246
ACOPOSinverter P84 User's Manual 2.10
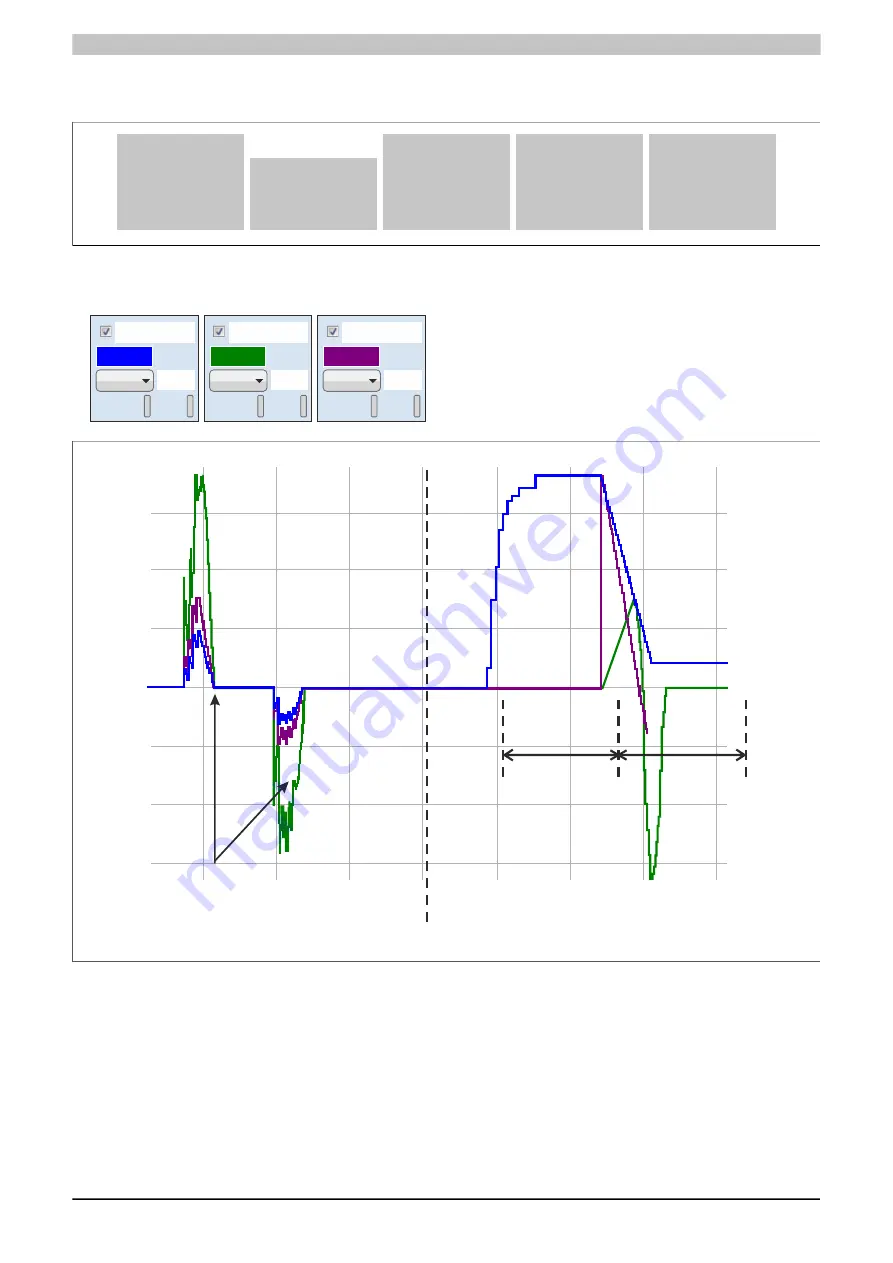
Test case 3: PID response to STOP with stop bit.
ACOPOSinverter PID configuration:
ACC:
DEC:
HSP:
LSP:
1
1
50.0 Hz
0.0 Hz
PIF:
AIC1:
AIV1:
AIV1
CAN
0
PIF1:
PIF2:
PIP1:
PIP2:
0
8192
0
8192
RPG:
RIG:
RDG:
PRP:
7.00
0.01
0.00
0.0 s
POL:
POH:
AC2:
DE2:
-500
500
30
30
Test results:
siRPEInternal
Signed
Scaling
Zero
Dec
siSpdEstEnt
Signed
Scaling
Zero
Dec
siPIDQ13_ref
Signed
Scaling
Zero
Dec
siRPEInternal = PID fault
siSpdEstEnt = Motor speed
siPIDQ13_ref = PID output
Here Drive is already in RUN
when PID reference is moved
Here Drive is stop
when PID reference
Here position reference is asked when the
drive is already in RUN mode. As reaction,
the PID starts motor when PID reference
is changed. The motor speed is increase
CMD bit 8 = 1
Drive stops
Position reference
moves
CMD bit 8 = 0
Drive stops
CMD bit 8 = 0
moves
without respect ramp parameters (AC2)
If the inverter is already in the RUN mode if the PID reference variable is changed, the motor responds without
subsequent gain. The response is immediate.
If the inverter stops (e.g. by CMD-bit 8), the motor responds, but accelerates on the basis of the AC2 parameter.
The result would be that the motor physically reaches the PID output via the tracking of the AC2 ramp and loses
time during this. This results in a positioning error compared to the start without AC2 tracking.
Summary of Contents for ACOPOSinverter P84
Page 2: ......
Page 391: ...Accessories ACOPOSinverter P84 User s Manual 2 10 391 4 7 2 Installation 8I0XF084 020 1...
Page 392: ...Accessories 392 ACOPOSinverter P84 User s Manual 2 10 8I0XF084 030 1...
Page 393: ...Accessories ACOPOSinverter P84 User s Manual 2 10 393 8I0XF084 040 1...
Page 394: ...Accessories 394 ACOPOSinverter P84 User s Manual 2 10 8I0XF084 050 1...
Page 395: ...Accessories ACOPOSinverter P84 User s Manual 2 10 395 8I0XF084 0x0 1...
Page 400: ...Accessories 400 ACOPOSinverter P84 User s Manual 2 10...







































































