



























5-23
TI 71M01D06-01EN 3rd Edition: 2012.12.01
1
I
2
I
p
I
2
t
cy
t
N
1
t
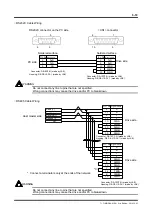
5.11 Drive Input Current
To select a circuit breaker, line filter and others in the device design, it is necessary to know
the input current of the drive. This section explains how to estimate the drive input current
from the motor’s operation pattern.
Use the drive current thus calculated only as a reference value. Be sure to verify the actual
drive current with the actual drive.
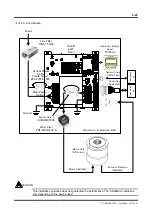
5.11.1 How to Obtain Input Current
The rated current of a circuit breaker and line filter should be chosen to match the actual
current value. If the motor is operated in a cycle of "acceleration - constant velocity -
deceleration - stop," the drive input current changes as shown in the graph below in each
interval. For this reason, it is necessary to obtain the effective current value for one cycle from
one acceleration to the next acceleration.
In the case of a circuit breaker and fuse, it is necessary to check the maximum input current
Ip
, and that the time is within the operation characteristic curve.
When the motor is accelerating, the input current increases proportionally to the increase of
velocity. When the motor is at constant velocity, the constant input current is conducted
according to drive loss, bearing friction torque and external load torque. When the motor is
decelerating, no input current is conducted because regeneration energy is returned.
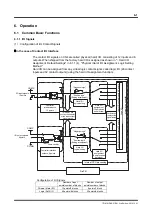
The drive loss under acceleration and at constant velocity can be obtained from the graph
below, which shows drive loss as a function of motor torque. Normally, 70% to 80% of the
maximum torque is used for torque during acceleration and deceleration. The torque at
constant velocity is the value obtained by adding motor bearing friction torque and load torque.
Here, the drive loss is calculated by setting the bearing friction torque to 10% of the maximum
torque.
Motor torque (%)
D
rive
lo
ss
(W
)
0
20
40
60
80
100
100
200
300
Drive current "E: 50A"
Velocity waveform
Input current
Acceleration
Constant velocity
(maximum velocity)
Deceleration
Stop
Acceleration
Cycle time