

























5-14
TI 71M01D06-01EN 3rd Edition: 2012.12.01
19
36
1
3
2
1
18
36
21
20
19
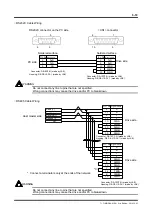
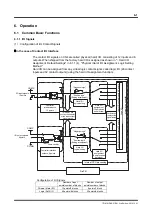
5.9 Controller Interface Connector <CN4>
5.9.1 Contact I/O Interface
Cable Specifications
Interface
AWG#28 to AWG#20 (0.08 ~ 0.5mm
2
), cable with a common
shield, external diameter
∅
14mm or less, length 3m or less
Option cable: C1P-ENN-4202-
Connector: PCR-S36FS (made by Honda Tsushin Kogyo)
Hosing: PCR-LS36LA (made by Honda Tsushin Kogyo)
<CN4> connector
Case ground (shielded cable)
Insertion surface
Soldered surface
Cable: UL2464 AWG28X25P