

























6-39
TI71M01D06-01EN 3rd Edition: 2012.12.01
Acceleration/deceleration type
Set the acceleration/deceleration type using system setup register 3 in the case of jog and
homing and using table data in the case of incremental positioning move and absolute
positioning move.
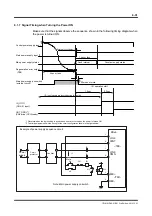
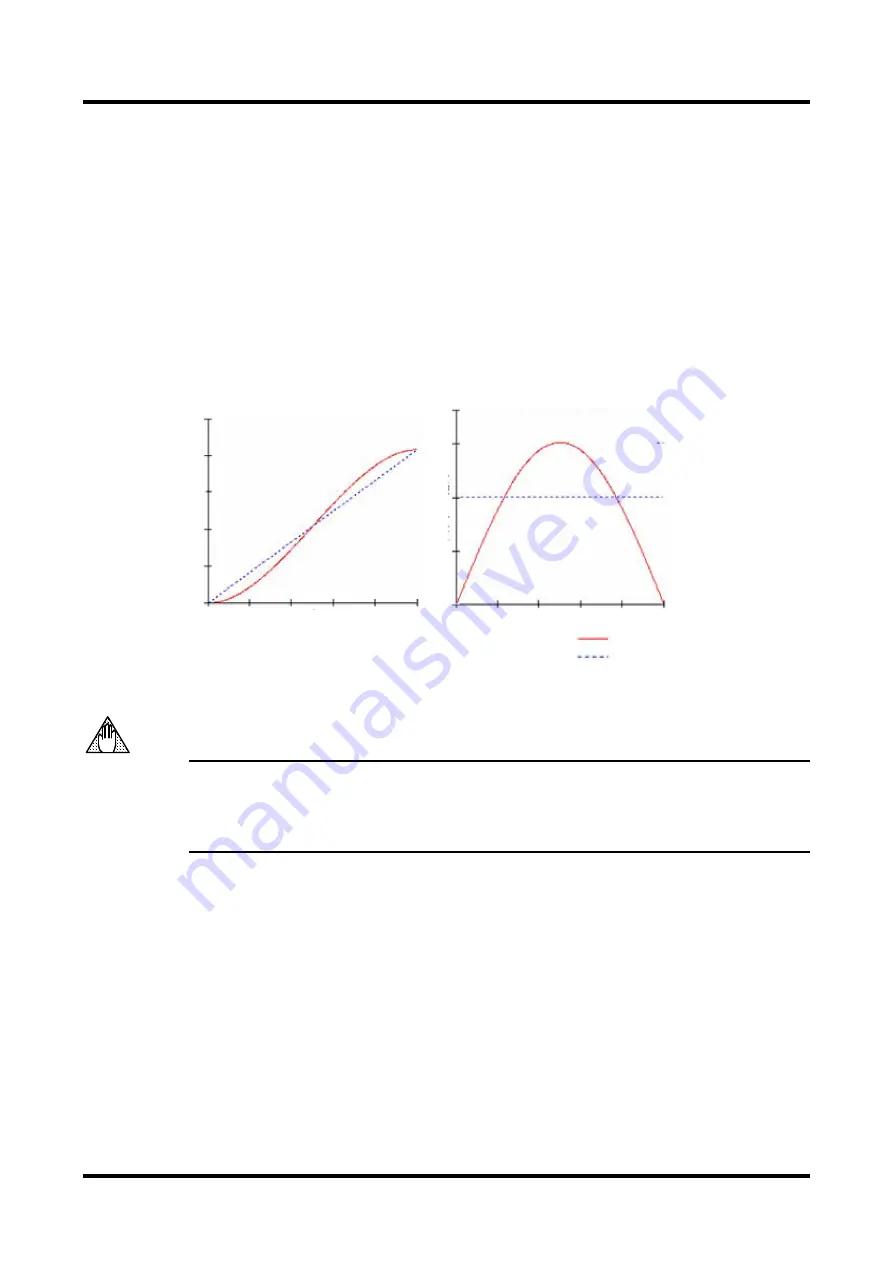
Select either constant acceleration or S-curved profile for the acceleration/deceleration type.
The figures below show the velocity characteristics and torque/thrust characteristics of each
type. If you select constant acceleration, fast acceleration is possible, but the motor tends to
induce larger vibrations into the mechanical system. If you select an S-curved
acceleration/deceleration profile, the movement becomes smooth and the vibrations induced
in the mechanical system can be reduced. For this reason, the settling time is shorter in most
cases, but the acceleration/deceleration time becomes longer.
Velocity and Acceleration Profiles for Each Acceleration Type
If the maximum value of the torque/thrust profile exceeds the maximum torque of the motor, a
position deviation is generated, which may cause instability phenomena such as hunting in
the control.
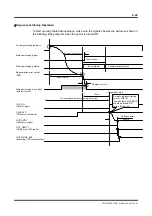
See "Guidelines for setting acceleration/deceleration time" and set the
acceleration/deceleration time correctly.
CAUTION
Torque/thrust profiles
Velocity profiles
Torq
ue/thru
st
Veloc
ity
Time
Time
S-curved profile
Constant acceleration