



























6-27
TI71M01D06-01EN 3rd Edition: 2012.12.01
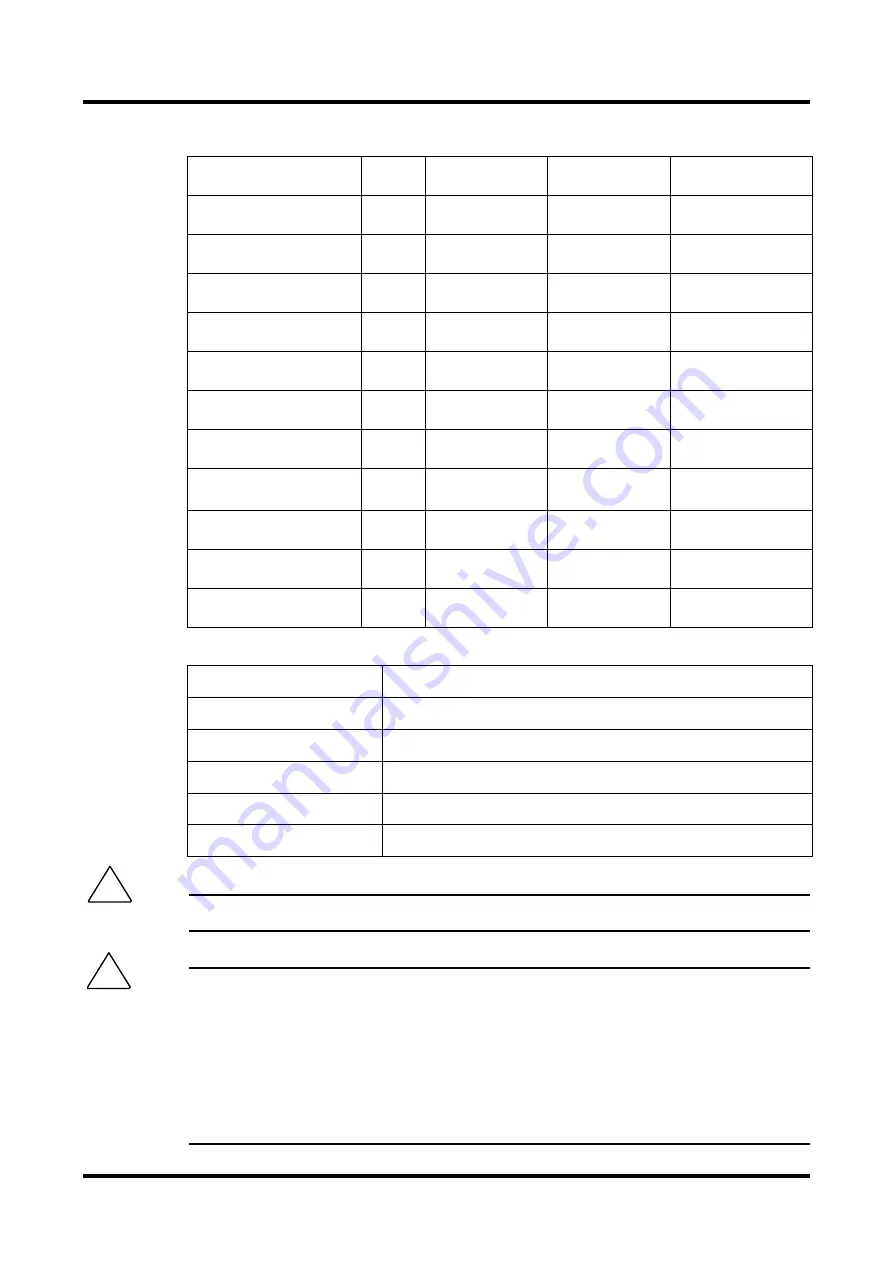
#parameters Related to Error Process
Error name
Error
code
Error valid/ invalid
setting
Error process type
setting
Error range setting
Over speed
24.0
Error process setup
register 1
Error process setup
register 1
Overload
22.1
22.2
Error process setup
register 1
Error process setup
register 1
-
Excessive position deviation
23.0
Error process setup
register 1
Error process setup
register 1
#18 (Forward direction)
#19 (Reverse direction)
Excessive position command
difference value
31.0 Always
valid
Error process setup
register 1
-
Coordinate system error A
16.1
Error process setup
register 1
Error process setup
register 1
-
Bus voltage drop
20.3
Error process setup
register 1
Error process setup
register 1
-
Main power supply error
21.0
Error process setup
register 1
Error process setup
register 1
-
Hardware EOT
42.0
43.0
Error process setup
register 2
Error process setup
register 2
Set to generate an error
at the position of the
proximity sensor.
Software EOT
44.0
45.0
Error process setup
register 2
Error process setup
register 2
#42 (Forward direction)
#43 (Reverse direction)
Controller interface
communication error
47.0
Error process setup
register 2
Error process setup
register 2
-
Interface immediate stop
46.2
Error process setup
register 2
Error process setup
register 2
-
Error Process Types
Error process type
Behavior
Decelerate and stop, and maintain
servo ON
The drive instructs the motor to decelerate and stop. The servo is kept turned
ON after stopping.
Decelerate and stop, and turn
servo OFF
The drive instructs the motor to decelerate and stop. The servo is turned OFF
after stopping.
Stop abruptly, and maintain servo
ON
The drive stops the motor abruptly and keeps the servo turned ON. The
deceleration time is determined by #80 [Deceleration time for immediate stop].
Stop abruptly, and turn servo OFF
The drive stops the motor abruptly and turns the servo OFF. The deceleration
time is determined by #80 [Deceleration time for immediate stop].
Turn servo OFF immediately
The drive turns the servo OFF immediately.
If you select "Turn servo OFF immediately," the motor may run freely. Make sure to take steps
to secure the safety, such as using an external brake system.
Even if the motor is set to perform servo deceleration in the case of a given error, the servo is
immediately turned off if the following errors occur before the error or during servo
deceleration. If any such error should occur, servo deceleration can no longer be used.
4.0 Watch dog error
15.* Encoder error
20.1 Overvoltage
20.2 IPM fault, current transformer detection
20.4 Low voltage (servo-off level)
20.5 A-phase, B-phase actual current monitoring
25.* Regeneration error
30.0 Servo not ready
!
DANGER
!
DANGER