


























6-38
TI71M01D06-01EN 3rd Edition: 2012.12.01
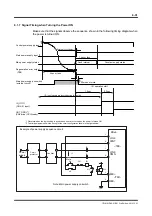
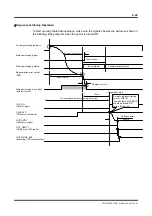
(1) Function
Explanation
Feed velocity (#64 [Feeding velocity #0] ~ #71 [Feeding velocity #7])
Set the feed velocity. Depending on the moving distance and acceleration/deceleration time,
the actual velocity may not reach the set feed velocity. Set a value smaller than the value of
#305 [User defined maximum velocity].
Acceleration/deceleration time (#72 [Acceleration time #0] ~ #75 [Acceleration time #3]/#76
[Deceleration time #0] ~ #79 [Deceleration time #3])
Set the acceleration time/deceleration time relative to the maximum velocity.
The fact that the acceleration time/deceleration time is set relative to the maximum velocity
means that if an operation that does not reach the maximum velocity is carried out, the actual
acceleration/deceleration time will be different from the set acceleration/deceleration time.
The acceleration/deceleration time is set as the “time till reaching the max velocity”.
Therefore acceleration/deceleration does not change even the feeding velocity is changed.
Guidelines for setting acceleration/deceleration time
Use the following formula to calculate the acceleration/deceleration time to be set.
(In the case of an S-curved acceleration/deceleration profile, the acceleration/deceleration time
should be set to approximately 1.5 times the value calculated from the formula below.)
t:
Acceleration/deceleration time [sec]
JM:
Rotor inertia of the motor (See Section 2.1, "Standard Specifications") [kgm
2
]
JL:
Load inertia [kgm
2
]
v:
Feed velocity [rps]
T:
Maximum torque of the motor [Nm]
Tx:
Disturbance torque in the direction opposite to the motor output torque [Nm]
08:Margin
t =
0.8* (T-Tx)
(JM + JL) *2
π
v