




























6-52
TI71M01D06-01EN 3rd Edition: 2012.12.01
6.3 Jog
Move
When you execute the jog move command in the idle status, it is possible to move the motor
in the + direction or - direction. The acceleration/deceleration time, acceleration/deceleration
type and jog feed velocity can be specified individually.
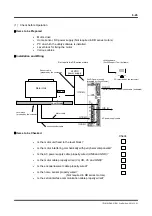
(1) I/O Signals to be Used
The I/O signals for jog move operation are used to give instructions via the controller interface.
If signals have not been assigned, assign them with the hard I/O assignment function as
needed.
(To operate via the serial interface, proceed to (2) Parameter Settings.)
I/O
Logic I/O signal
abbreviation
Logic I/O signal name
Input
IN_SERVO Servo
IN_JOG_UP Jog
up
IN_JOG_DN Jog
down
Output
OUT_DRDY Drive
ready
OUT_SRDY Servo
ready
OUT_JOG_EXE
Executing jog operation