


























7-1
TI71M01D06-01EN 3rd Edition: 2012.12.01
7. Tuning
7.1 How to Tune the Servo
Adjustment of #parameters Related to Control
When you tune the servo, set #parameters related to the position and velocity control loops in
good balance to prevent oscillation, vibration and runaway. Typically, the servo can be
adjusted by performing auto-tuning, which estimates load inertia, and automatically adjust
#parameters related to control.
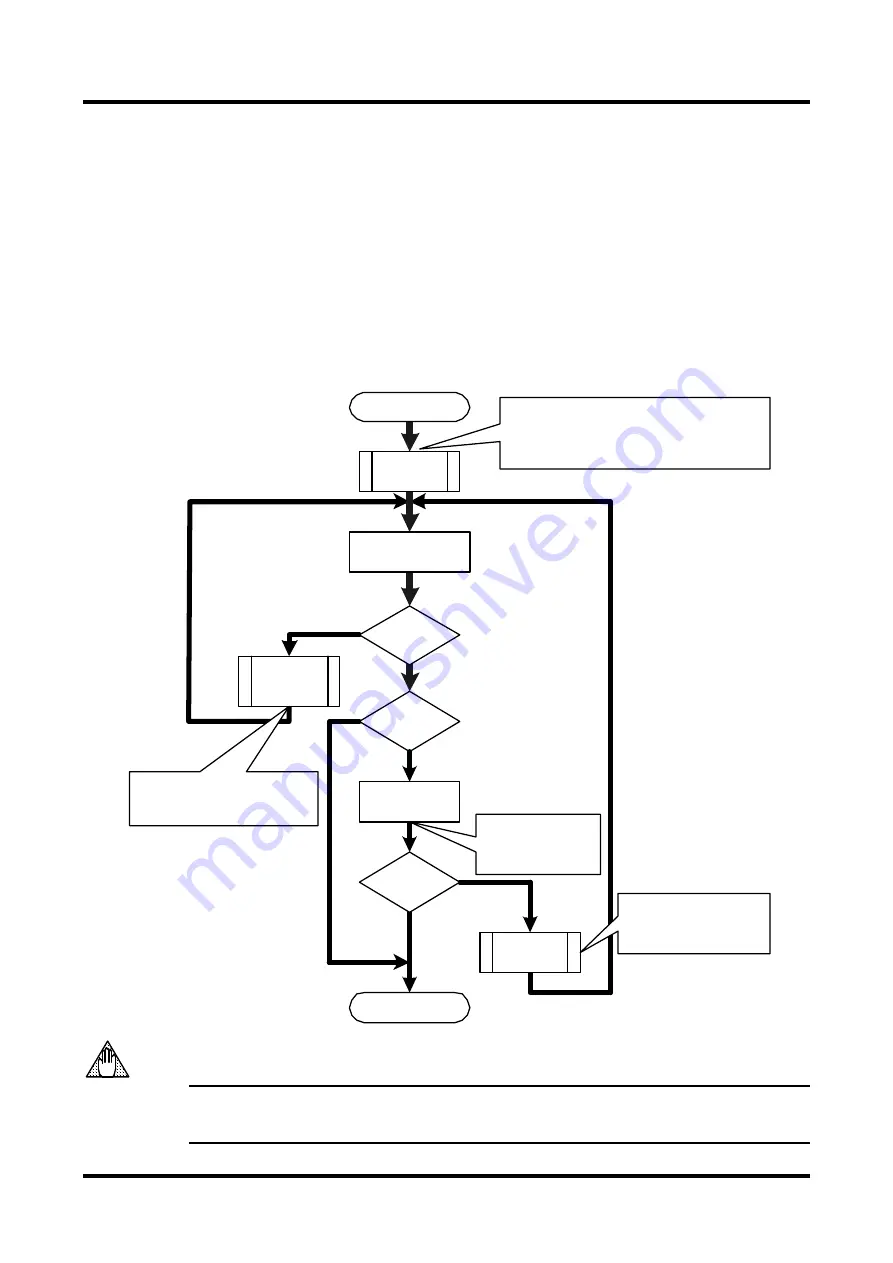
The flowchart below shows an example of how the servo can be adjusted.
If the motor oscillates while adjusting the servo, take actions by referring to "Main Causes of
Motor Oscillation and Actions to be Taken" on the next page.
If the setting of the control system is inappropriate, the motor may begin to oscillate or even
become unstable in some cases. Take enough precautions with respect to the motor's
operation range and its safety when you tune the servo.
YES
NO
NO
YES
YES
NO
CAUTION
Start adjustment
End setup
Is the
servo rigidity
insufficient?
Increase the
servo rigidity
Prevent
resonance
Prevent
resonance
Perform
auto-tuning
Increment the current
value of #1 [servo
rigidity setting status]
by 1
See Section 6.4.3, "Auto-tuning Operation." If the
motor oscillates while performing auto-tuning,
see Section 7.2.3, "If the Motor Oscillates during
Auto-tuning."
Take actions against
resonance by referring to
Section 7.2, "Resonance
Prevention."
Take actions against resonance by
referring to Section 7.2,
"Resonance Prevention."
Execute the
operations used
in the system
Does
the motor
oscillate?
Does
the motor
oscillate?