


























7-12
TI71M01D06-01EN 3rd Edition: 2012.12.01
FF #parameter Adjustment Example
This example adjusts the position FF #parameter and the acceleration FF #parameter using
the [oscilloscope function] of DrvX3 Support Tool. Please note, however, that the behavior of
the motor may not always present the same characteristics as shown in this example,
depending of the unit to which the motor is installed and the load. During adjustment,
gradually change #parameter values while checking the behavior of the motor.
Each parameter has the following characteristics.
Position FF setting cancels the position differential feedback when 100%, and it will be set
close to [position error is zero] during constant velocity movement. If position FF is set to over
100%, the motor's actual position is always in front of the move command position.
Thus, the motor will significantly [overshoot] when command distribution is finished.
However, there is a general tendency that the settling time gets shorter by overshooting the
motor once.
Normally, the overshoot tolerance is restricted by the motor stroke and the structure of the
unit to be mounted, for instance.
Excessive overshooting may damage the unit, so exercise caution.
Although tracking performance increases as acceleration FF is set to a larger value, it may
not be suitable for all applications because of louder servo sound.
Operating Conditions
Motor: LM505 Load: 0.6 [kg] Amount of movement: 8000 [pls] Coin window: 100 [pls]
Servo stiffness setup: 5
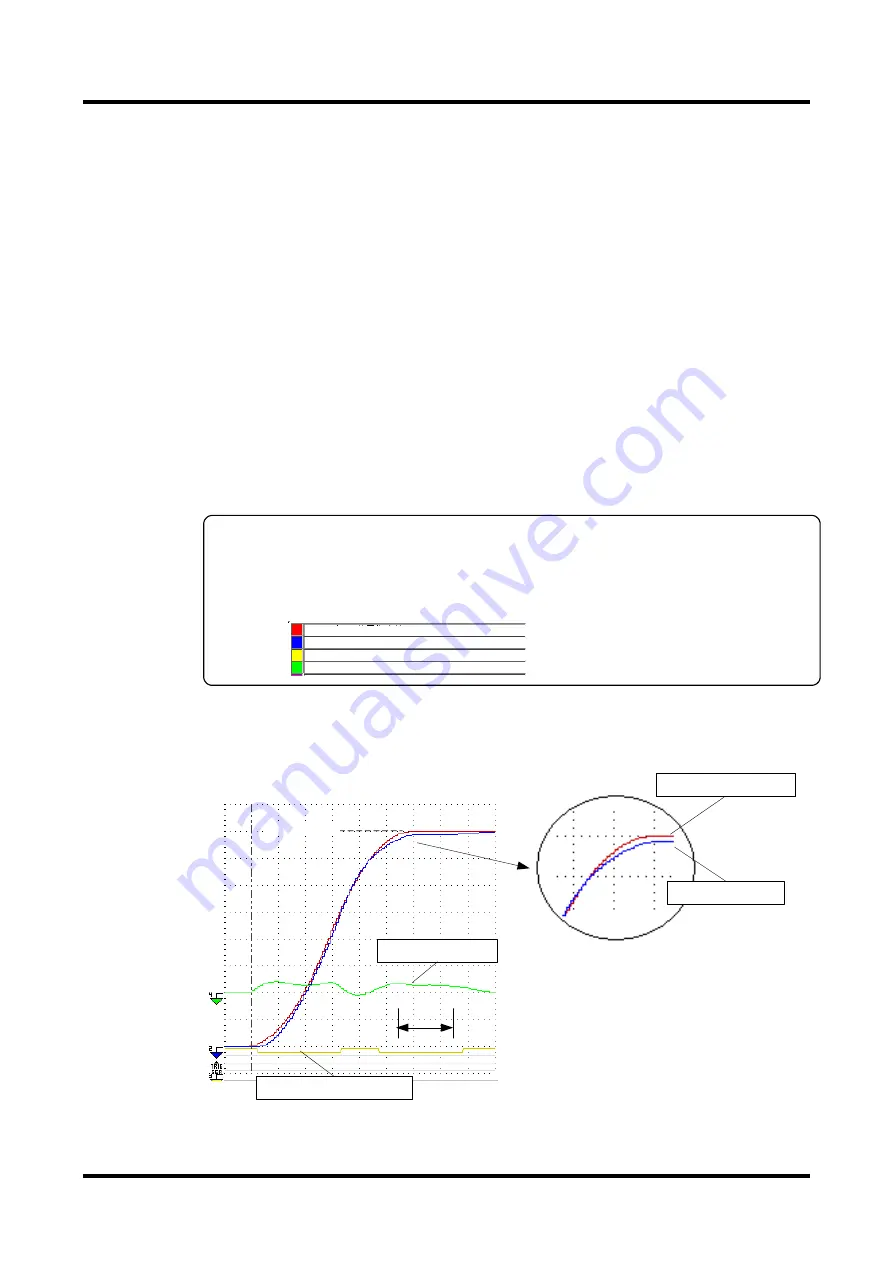
Observed Waveforms
#320 Status register 1 Bit 16 Coin (no position error) status
CH1
CH2
CH3
CH4
#370 Commanded position value (pulse)
#371 Actual position value (pulse)
#372 Position error (pulse)
In the case of factory default settings: Pos_FF (#14) = 90%, Vel_FF (#15) = 100%,
Acc_FF (#16) = 0%
CHI commanded position value
CH2 actual position value
Settling time
10ms/DIV
In the waveform shown in the figure, the position error
(difference between the commanded position value and
the actual position value) is always on the plus (+) side
(there is a tracking delay). In the vicinity of the target
position, positioning is done gradually to the target
position without overshooting.
CH4 position error (pulse)
CH3 coin (no position error) status
Target position