





























2-23
TI71M01D06-01EN 3rd Edition: 2012.12.01
2.10 Restrictions due to Regeneration
In driving operations where the motor alters between rotation and stop frequently and
applications where the motor is rotated by external force, current may be applied to the
regenerative resistor. If current is conducted to the regenerative resistor in this manner, some
operation restrictions apply depending on the heat release value of the regenerative resistor
built into the drive.
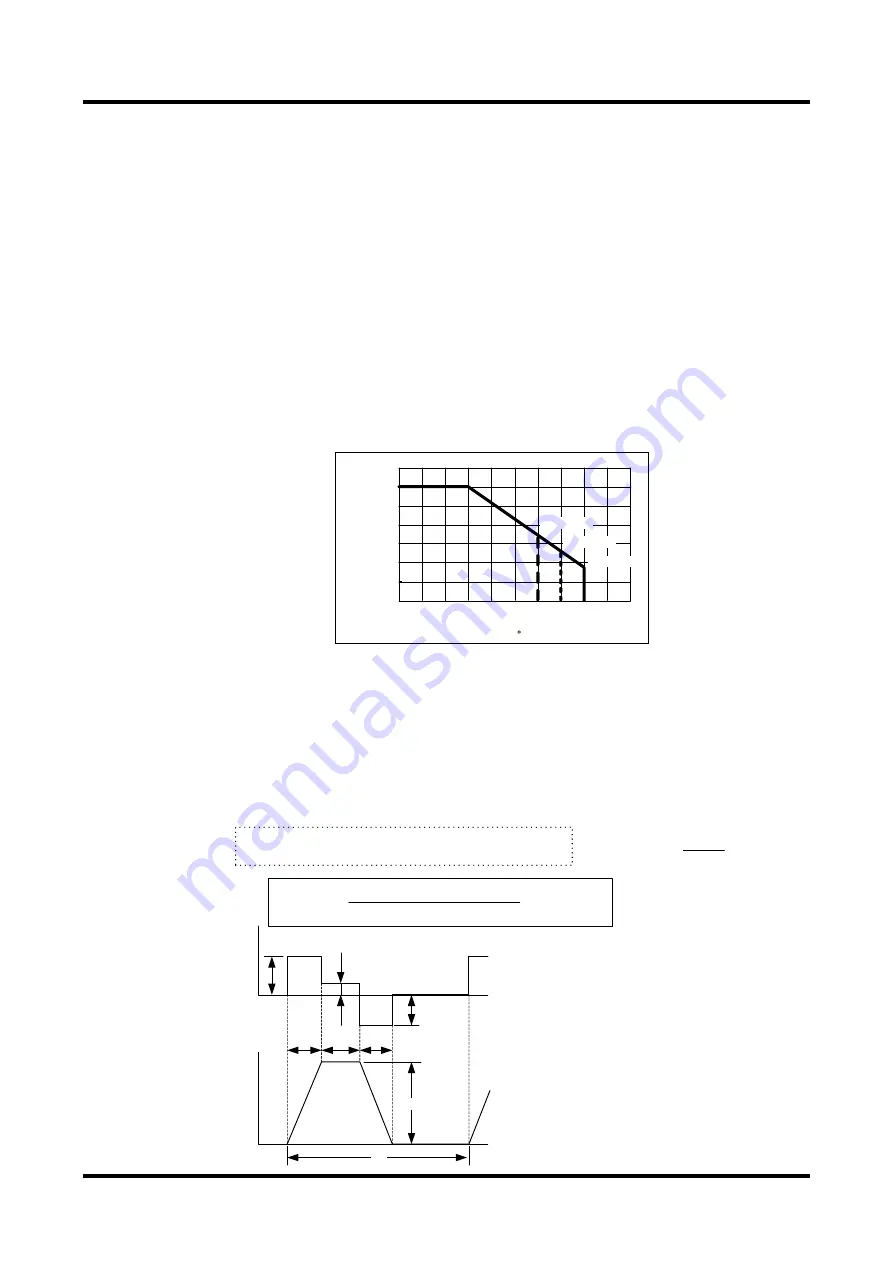
2.10.1 Restrictions on Regenerative Resistor Power Consumption
The relationship between power consumption of the regenerative resistor and current
squared duty of the motor is restricted as shown in the graph below.
The current squared duty and power consumption of the regenerative resistor should be
calculated according to Sections 2.10.2 and 2.10.3. If the regeneration power consumption
exceeds the limit, a separate external resistor is required. Please contact Yokogawa about
external resistors.
Limits on Regeneration Resistor Power
Consumption to Current Squared Duty
0
20
40
60
80
100
120
140
0
10
20
30
40
50
DR5A-300
DR5A-400
DR5A-500
I
2
duty[%]
Drive ambient temperature: 50 C
Re
ge
ne
ra
tion
Re
si
st
or
P
o
we
r Co
n
sum
pt
io
n
[W
]
2.10.2 How to Calculate Current Squared Duty
The current squared duty is expressed by the following equation.
I
2
duty =
(actual current / maximum current)
2
The current squared duty is expressed using the formula below if the load conditions and
operation time are set as shown in the figures below when repeating the motor operation with
a cycle of "acceleration - constant velocity - deceleration - stop."
The current square duty can be measured by the oscilloscope function of the utility software.
Utility software oscilloscope function monitor number
#
385
Pre-filtering current square duty
η
C
,
η
c
1
,
η
c
2
,
η
c
3
=
current squared duty
N
rmax
=
velocity (rps)
t
CY
=
cycle time (msec)
t
1
, t
2
, t
3
=
time (msec)
η
c
1
η
c
3
η
c
2
N
rmax
t
CY
#385
32768
η
c
1
,
η
c
2
,
η
c
3
=
t
dec
t
const
t
acc
( )
%
100
3
2
1
2
=
×
+
+
CY
dec
const
acc
t
C
t
C
t
C
t
duty
I
η
η
η
M
o
tor c
u
rre
n
t
squa
re
d du
ty
M
o
tor
vel
oci
ty
(rp
s)