





























13 - 46
Chapter 13 Control Sub Functions
[4] Setting the speed change function using an external command
signal
The speed can also be changed using an "external command signal".
The following shows the data settings and sequence program example for
changing the control speed of axis 1 using an "external command signal". (In this
example, the control speed is changed to "10000.00mm/min".)
(1) Set the following data to change the speed using an external command
signal.
(Use the speed change time chart shown in section (2) below as a reference,
and set using the sequence program shown in section (3).)
Setting item
Setting
value
Setting details
Buffer memory address
LD77MS2
LD77MS4
LD77MS16
Pr.42
External command
function selection
1
Set "1: External speed change request".
62+150n
Cd.8
External command
valid
1
Set "1: Validate the external command".
1505+100n 4305+100n
Cd.14
New speed value 1000000 Set the new speed.
1514+100n
1515+100n
4314+100n
4315+100n
n: Axis No.-1
: Set the external command signal (D1) in "
Pr.95
External command signal selection
" at LD77MS16 use.
Refer to Section 5.2 "List of parameters" and Section 5.7 "List of control data" for details on the setting details.
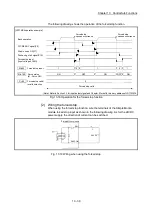
(2) The following shows the speed change time chart.
[LD77MS4 operation example]
Pr. 42 External command function selection
V
t
0
1
0
1
Md.40 In speed change processing flag
Cd. 14 New speed value
1000000
1
0
Cd. 8 External command valid
Dwell time
BUSY signal
Error detection signal
PLC READY signal
Positioning start signal
Positioning complete signal
READY signal
Start complete signal
[Y10]
[XC]
[X0]
[Y0]
[X10]
[X8]
[X14]
External command signal
All axis servo ON
[Y1]
(Note): Refer to Section 3.3 for input/output signal of LD77MS16.
Fig. 13. 25 Time chart for changing the speed using an external command signal
Summary of Contents for MELSEC-L Series
Page 2: ......
Page 30: ...MEMO ...
Page 70: ...2 10 Chapter 2 System Configuration MEMO ...
Page 83: ...3 13 Chapter 3 Specifications and Functions MEMO ...
Page 103: ...3 33 Chapter 3 Specifications and Functions MEMO ...
Page 107: ...3 37 Chapter 3 Specifications and Functions MEMO ...
Page 111: ...3 41 Chapter 3 Specifications and Functions MEMO ...
Page 115: ...3 45 Chapter 3 Specifications and Functions MEMO ...
Page 140: ...4 22 Chapter 4 Installation Wiring and Maintenance of the Product MEMO ...
Page 253: ...5 113 Chapter 5 Data Used for Positioning Control MEMO ...
Page 342: ...5 202 Chapter 5 Data Used for Positioning Control MEMO ...
Page 438: ...7 20 Chapter 7 Memory Configuration and Data Process MEMO ...
Page 440: ...MEMO ...
Page 485: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Page 594: ...9 134 Chapter 9 Major Positioning Control MEMO ...
Page 624: ...10 30 Chapter 10 High Level Positioning Control MEMO ...
Page 656: ...11 32 Chapter 11 Manual Control MEMO ...
Page 690: ...12 34 Chapter 12 Expansion Control MEMO ...
Page 798: ...13 108 Chapter 13 Control Sub Functions MEMO ...
Page 866: ...14 68 Chapter 14 Common Functions MEMO ...
Page 884: ...15 18 Chapter 15 Dedicated Instructions MEMO ...
Page 899: ...16 15 Chapter 16 Troubleshooting MEMO ...
Page 1036: ...Appendix 88 Appendices MEMO ...
Page 1039: ......







































































