




























5 - 6
Chapter 5 Data Used for Positioning Control
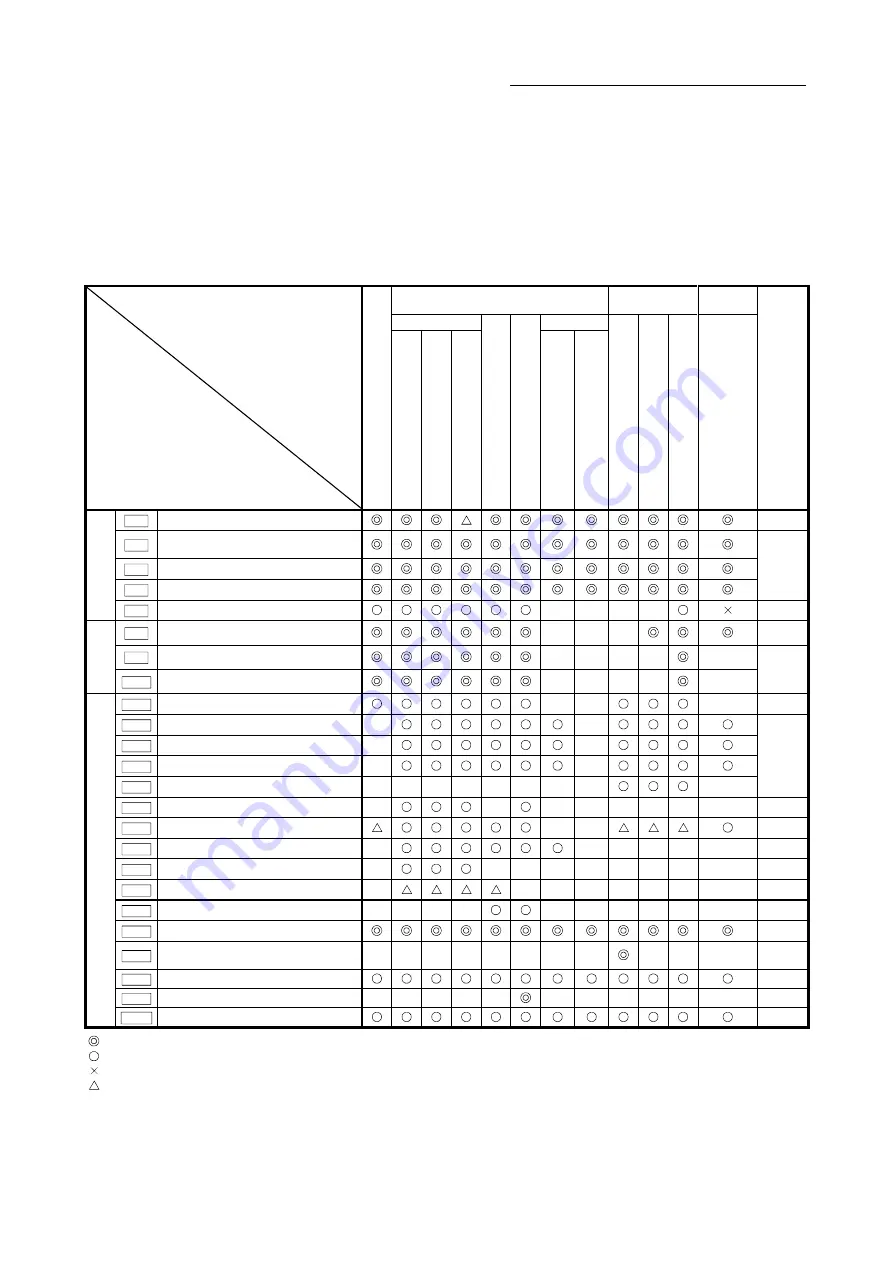
5.1.2 Setting items for positioning parameters
The table below lists items set to the positioning parameters. The "positioning
parameters" are set for each axis for all controls achieved by the Simple Motion
module.
For details of controls, refer to "Section 2". For details of setting items, refer to Section
5.2 "List of parameters".
Control
Positioning parameter
OP
R co
nt
ro
l
Major positioning control
Manual control
Expansion
control
R
el
at
ed
s
ub
func
tion
Position control
1
to
4 axi
s
sp
ee
d co
nt
ro
l
S
peed
-p
os
iti
on
o
r po
si
tion
-s
pee
d
co
nt
ro
l
Other control
Ma
nual
p
ul
se g
en
er
at
or op
er
at
io
n
In
ch
in
g op
era
tio
n
JO
G ope
ra
tion
S
peed
-t
or
que
co
nt
ro
l
1-
axi
s l
ine
ar
c
ont
rol
2/
3/
4-
axi
s l
ine
ar
in
te
rp
ol
at
io
n
co
nt
ro
l
1-
axi
s fi
xe
d-
fe
ed
co
nt
rol
2/
3/
4-
axi
s fi
xe
d-
fe
ed
co
nt
rol
2-
axi
s ci
rc
ul
ar
in
te
rpol
ati
on c
ont
rol
C
ur
re
nt
va
lu
e
ch
angi
ng
JUM
P
in
st
ru
cti
on,
NOP
in
st
ru
cti
on
,
LO
OP
to
LE
N
D
B
as
ic par
ame
te
rs
1
Pr.1
Unit setting
–
Pr.2
Number of pulses per rotation (AP)
(Unit: PLS)
13.3.2
Pr.3 Movement amount per rotation (AL)
Pr.4 Unit magnification (AM)
Pr.7 Bias speed at start
– – – –
–
Ba
si
c
par
ame
te
rs
2
Pr.8 Speed limit value
– – –
13.4.1
Pr.9 Acceleration time 0
– – – –
–
13.7.6
Pr.10 Deceleration time 0
– – – –
–
D
eta
ile
d par
ame
te
rs 1
Pr.11 Backlash compensation amount
– –
– 13.3.1
Pr.12 Software stroke limit upper limit value
–
–
13.4.3
Pr.13 Software stroke limit lower limit value
–
–
Pr.14 Software stroke limit selection
–
–
Pr.15 Software stroke limit valid/invalid setting
–
–
–
–
–
–
–
–
–
Pr.16 Command in-position width
–
–
– – – – – – 13.7.5
Pr.17 Torque limit setting value
– –
13.4.2
Pr.18 M code ON signal output timing
–
– – – –
–
13.7.3
Pr.19 Speed switching mode
–
– – – – – – –
–
–
Pr.20 Interpolation speed designation method
–
– – – – – –
–
–
Pr.21 Current feed value during speed control
–
–
–
–
– – – – – –
–
Pr.22 Input signal logic selection
–
Pr.24
Manual pulse generator/Incremental
synchronous encoder input selection
– – – – – – – –
– –
–
–
Pr.80 External input signal selection
14.4
Pr.81 Speed-position
function
selection
– – – – –
– – – – – –
–
Pr.82 Forced stop valid/invalid selection
13.4.5
: Always set
: Set as required ("–" when not required)
: Setting not possible
: Setting restricted
– : Setting not required (
When
the value is the default value or within the setting range, there is no problem.)
Summary of Contents for MELSEC-L Series
Page 2: ......
Page 30: ...MEMO ...
Page 70: ...2 10 Chapter 2 System Configuration MEMO ...
Page 83: ...3 13 Chapter 3 Specifications and Functions MEMO ...
Page 103: ...3 33 Chapter 3 Specifications and Functions MEMO ...
Page 107: ...3 37 Chapter 3 Specifications and Functions MEMO ...
Page 111: ...3 41 Chapter 3 Specifications and Functions MEMO ...
Page 115: ...3 45 Chapter 3 Specifications and Functions MEMO ...
Page 140: ...4 22 Chapter 4 Installation Wiring and Maintenance of the Product MEMO ...
Page 253: ...5 113 Chapter 5 Data Used for Positioning Control MEMO ...
Page 342: ...5 202 Chapter 5 Data Used for Positioning Control MEMO ...
Page 438: ...7 20 Chapter 7 Memory Configuration and Data Process MEMO ...
Page 440: ...MEMO ...
Page 485: ...9 25 Chapter 9 Major Positioning Control MEMO ...
Page 594: ...9 134 Chapter 9 Major Positioning Control MEMO ...
Page 624: ...10 30 Chapter 10 High Level Positioning Control MEMO ...
Page 656: ...11 32 Chapter 11 Manual Control MEMO ...
Page 690: ...12 34 Chapter 12 Expansion Control MEMO ...
Page 798: ...13 108 Chapter 13 Control Sub Functions MEMO ...
Page 866: ...14 68 Chapter 14 Common Functions MEMO ...
Page 884: ...15 18 Chapter 15 Dedicated Instructions MEMO ...
Page 899: ...16 15 Chapter 16 Troubleshooting MEMO ...
Page 1036: ...Appendix 88 Appendices MEMO ...
Page 1039: ......







































































