





























A-62
TROUBLESHOOTING
A
TROUBLESHOOTING
A-63
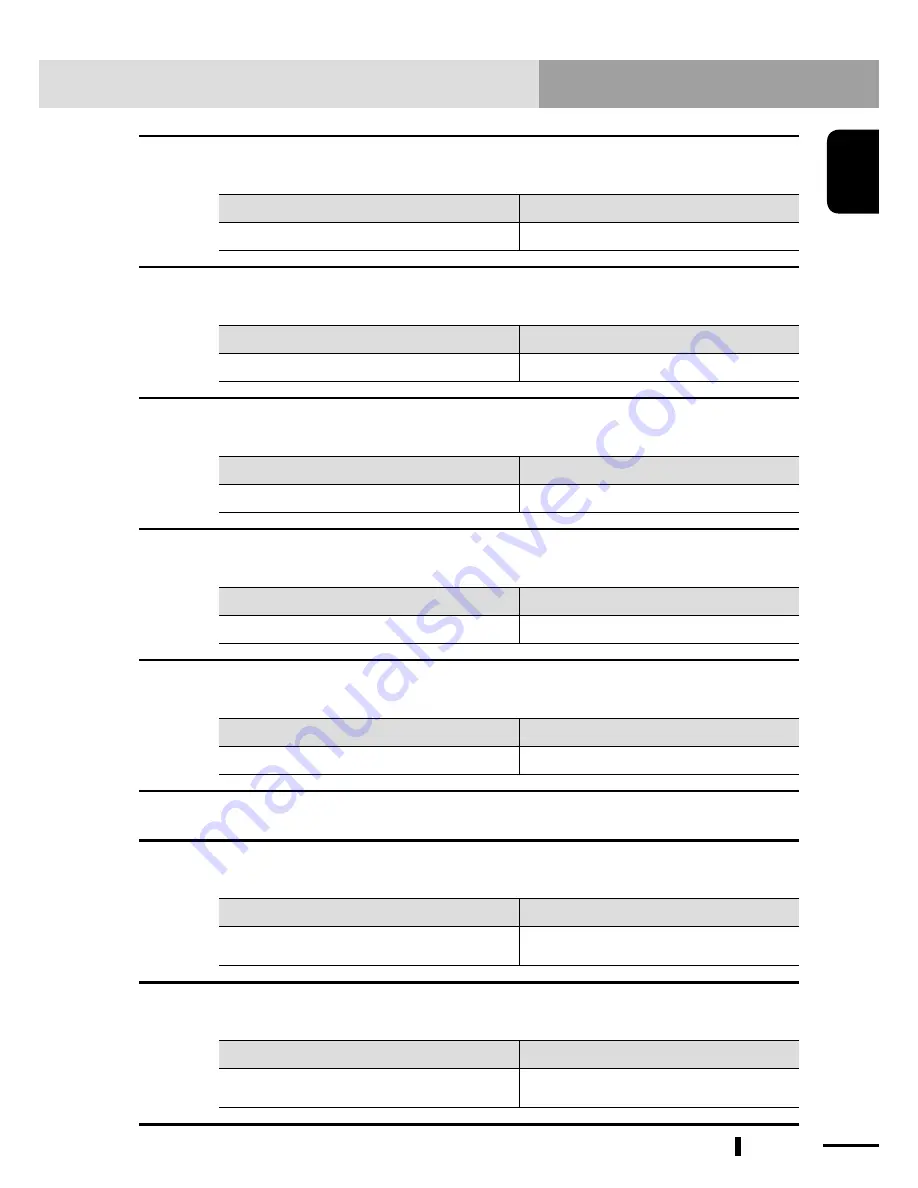
[20] iVY system errors
19.41 : ABS.RO ERROR
Code
: &H1329
Meaning/Cause
Action
ROB I/O cable broke during power-off.
−−−
19.42 : ABS.RE ERROR
Code
: &H132A
Meaning/Cause
Action
ROB I/O cable broke during power-on.
−−−
19.43 : ABS.OF ERROR
Code
: &H132B
Meaning/Cause
Action
−−−
−−−
19.44 : ABS.ME ERROR
Code
: &H132C
Meaning/Cause
Action
−−−
−−−
19.45 : ABS.BAT ERROR
Code
: &H132D
Meaning/Cause
Action
Absolute battery voltage is less than 2.5V.
Replace the absolute battery.
[20] iVY system errors
20.0 : Vision not installed
Code
: &H1400
Meaning/Cause
Action
No robot vision function settings.
Check to see if the iVY board is
properly connected.
20.1 : Vision init. error
Code
: &H1401
Meaning/Cause
Action
Error occurred during iVY board initial
processing.
Contact your YAMAHA representative,
and provide the error condition details.
Содержание RCX240
Страница 1: ...RCX240 EUR6127206 E107 Ver 2 06 Userʼs Manual YAMAHA 4 AXIS ROBOT CONTROLLER ...
Страница 2: ......
Страница 18: ......
Страница 34: ......
Страница 78: ......
Страница 402: ......
Страница 448: ...5 46 Chapter 5 TWO ROBOT SETTING MEMO ...
Страница 450: ......
Страница 480: ...6 30 Chapter 6 PARALLEL I O INTERFACE MEMO ...
Страница 482: ......
Страница 494: ......
Страница 506: ......
Страница 512: ......
Страница 522: ......
Страница 611: ...INDEX ...
Страница 612: ......
Страница 617: ......
Страница 619: ......







































































