





























4-31
Setting Explanation
Setting
Explanation
0
CCW direction is taken for positive command (counterclockwise seen from the
Servomotor output shaft)
1
CW direction is taken for positive command (clockwise seen from the Servomotor output
shaft)
•
This parameter sets the Servomotor’s direction of rotation.
•
Even if 1 is set, the Servo Driver’s encoder output phase (A/B phase) does not change (i.e., the Servo-
motor’s direction of rotation is simply reversed).
H
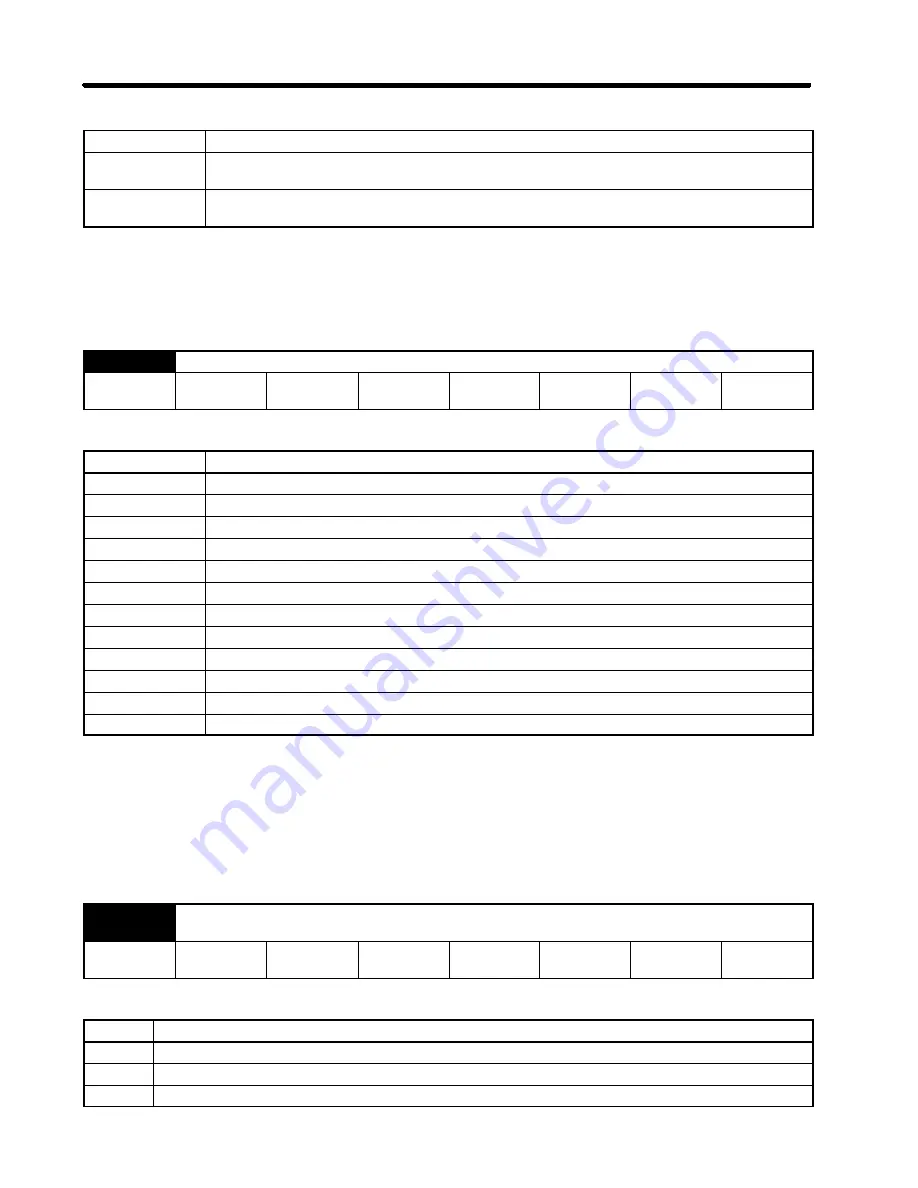
Control Mode Selection (Pn000.1)
Pn000.1
Function selection basic switch --- Control mode selection (All operation modes)
Setting
range
0 to b
Unit
---
Default
setting
1
Restart
power?
Yes
Setting Explanation
Setting
Explanation
0
Speed control (Analog command)
1
Position control (Pulse train command)
2
Torque control (Analog command)
3
Internal speed control settings
4
Internal speed control settings
←→
Speed control (Analog command)
5
Internal speed control settings
←→
Position control (Pulse train command)
6
Internal speed control settings
←→
Torque control (Analog command)
7
Position control (Pulse train command)
←→
Speed control (Analog command)
8
Position control (Pulse train command)
←→
Torque control (Analog command)
9
Speed control (Analog command)
←→
Torque control (Analog command)
A
Speed control with position-lock function (Analog command)
b
Position control with pulse disable function (Pulse train command)
•
Set to match the application content and the output form of the Host controller you are using.
•
If using switching control mode (7 to 9), switch the control mode using TVSEL (control mode switch
input).
•
If using internal speed control setting and another control mode (4 to 6), switch control mode using
SPD1 and SPD2 (speed selection command inputs 1 and 2).
H
Alarm Stop Selection (Pn001.0)
Pn001.0
Function selection application switch 1 --- Stop selection for alarm generation with servo OFF
(All operation modes)
Setting
range
0 to 2
Unit
---
Default
setting
2
Restart
power?
Yes
Setting Explanation
Setting
Explanation
0
Stop Servomotor using dynamic brake (dynamic brake stays ON after Servomotor has stopped).
1
Stop Servomotor using dynamic brake (dynamic brake released after Servomotor has stopped).
2
Stop Servomotor using free run.
Operation
Chapter 4
AUDIN - 7 bis rue de Tinqueux - 51100 Reims - France - Tel : 03.26.04.20.21 - Fax : 03.26.04.28.20 - Web : http: www.audin.fr - Email : [email protected]







































































